Hi all!
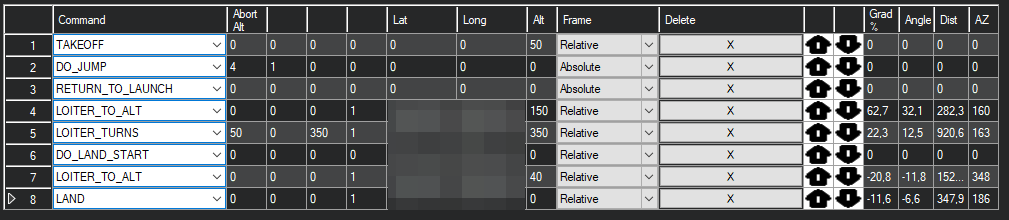
Hi all! The situation is as follows: I was flying on an auto mission, and everything was fine until I pressed SET WP 6 - do_land_start. Logically, the plane should have gone to the pre-landing loiter and landed. But it turned out that the loiter_to_alt was ignored and the plane immediately went to land from a height of 350 m, instead of 40 m. In the simulator, it was possible to reproduce the error using the SET WP command. If you press RTL, then everything works properly. Does anyone know what could be the reason? Is this a bug in the mission planner itself? I’ve had 2 plane crashes. Screens added.
Hey, Vitalii
I’m investingating a crash with exactly the same behavior. The set WP is a clue I was missing, I’ll try to debug it with that information and get back to this thread if I found something.
Speaking of, your plane seems to flare really high, this is an issue I’m also seeing.
1 Like
nav_loiter_bug.txt (483 Bytes)
Created a simple flightplan around MavProxy’s starting position that reproduces this behavior. Allow the plane to climb to 350 and then execute wp set 3. Note this also requires RTL_AUTOLAND to be set, otherwise the plane won’t arm.
Behavior observed:
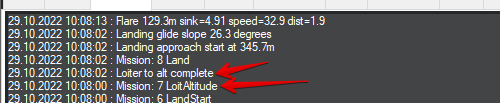
- loiter to alt immediately completes at wrong altitude
- plane tries to land at the heading it was at, then turns to some other heading, but not towards the landing point
- flare happens at very high altitude (300 m in my case)

Proposed solution. Would like some eyes on it.