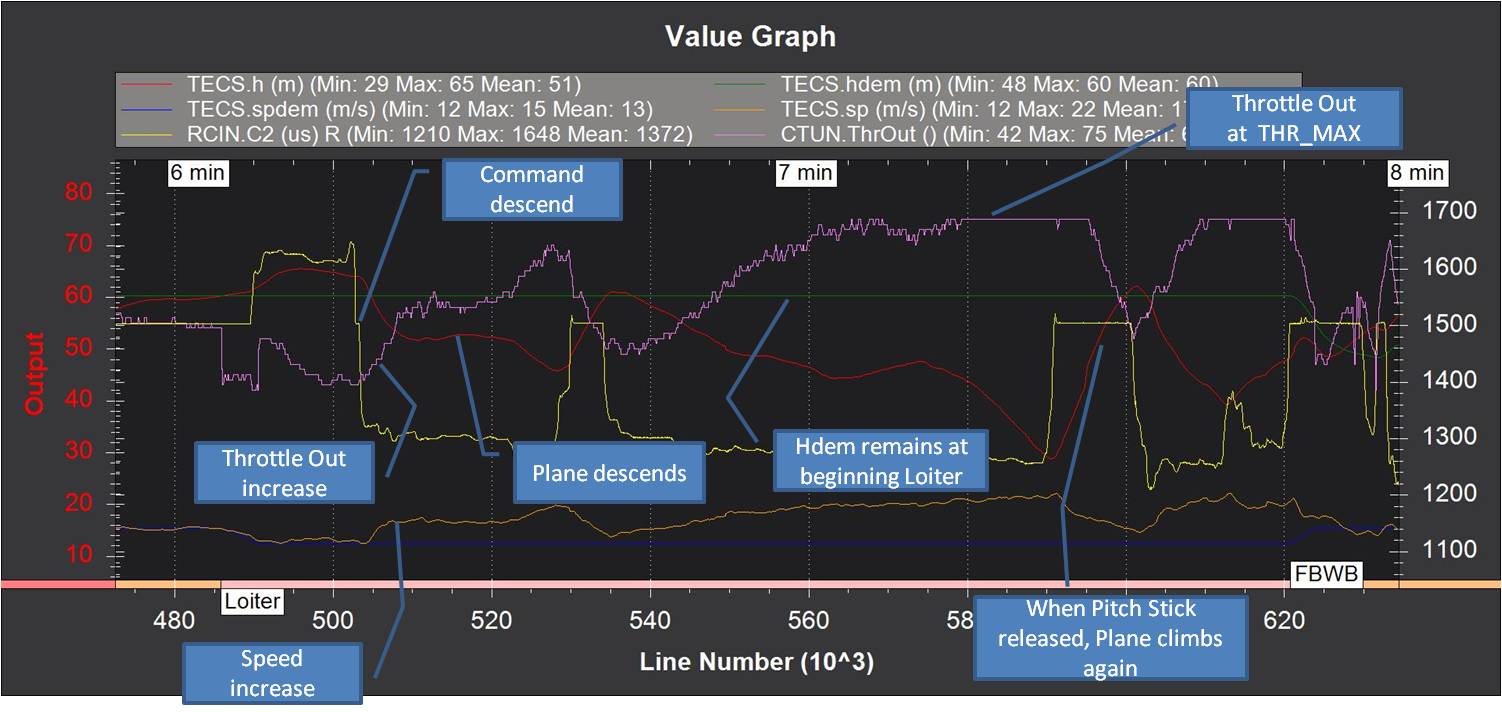
When I want to descend in Loiter Mode by Stick input of Pitch the Wing descend but proportionally to
the difference to the original altitude the THR_OUT increase up to THR_MAX and of course also the speed.
Even when reducing with Throttle Stick down to min. And after releasing the Pitch Stick it climbs
immediately on the original altitude.
In the log the param TECS dhdem remains on its Loiter start value and the Pitch Intput has no
influence on it. As it does in FBWB Mode.
Here the situation:
Are you describing the behavior in LOITER (forward flight), where throttle increases when applying pitch down? And throttle decreases to the point of stall when applying pitch up input? Because I’m getting this problem in (regular) ArduPlane and have not seen much discussion.
Yes, in Plane Loiter. In FBWB Mode (also Autothrottle) it is possible to influence the target altitude.
But not in Loiter e.g. to descend in a spiral. (Helix)
And yes, I’m surprised also that nowbody else found this strange so far.
Otto