My Hexacopter does not hold altitude in Loiter (or alt hold for that matter). I did a test with a simple mission to TO to 2 M then Loiter at 2 M until the low voltage battery alarm. Flight was 13-14 minutes.
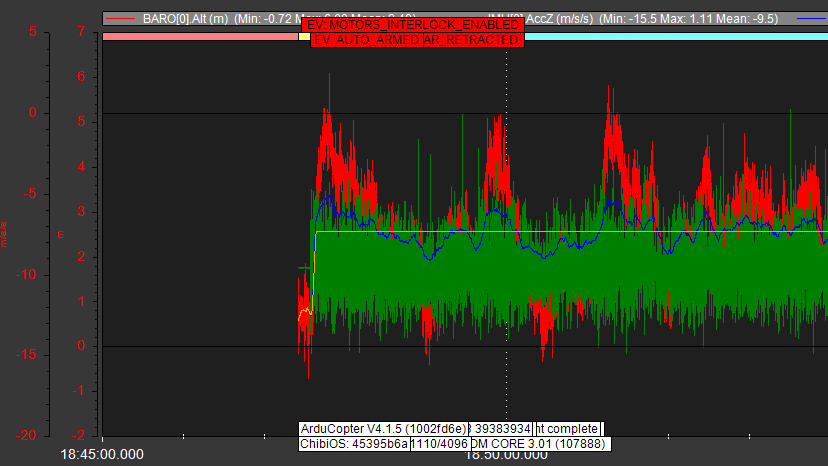
During this mission the altitude varied from 4 inches AGL to 3 M AGL when 2 M was expected.
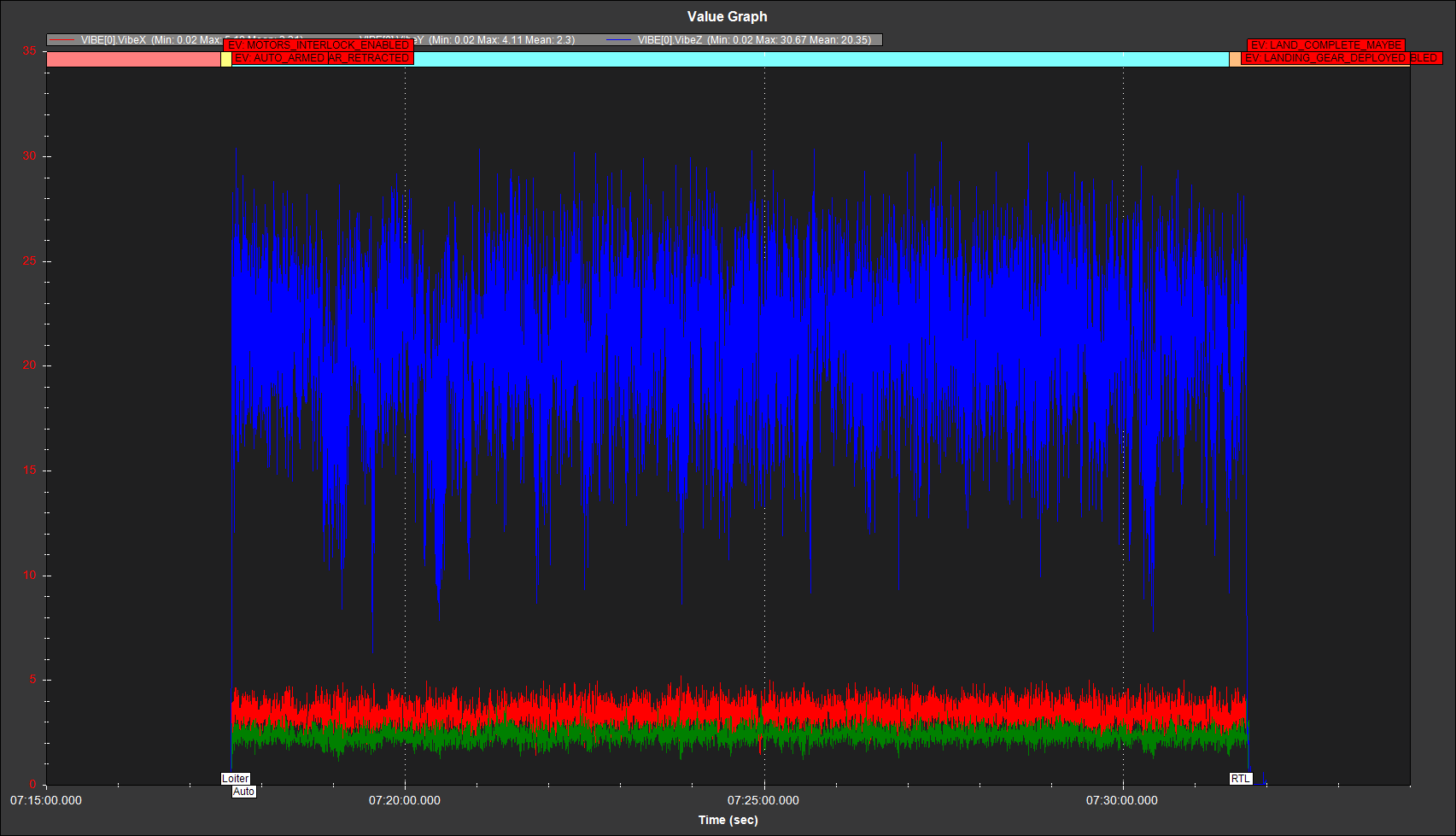
From what I read this might be a Z vibration issue. My X and Y are +/- 1 m/s/s and my Z is -5 to - 13 m/s/s which does not seem good but what do I know.
Set these parameters on ground and preferably disarm (A confident pilot could set them in flight with GCS or CH6 tuning knob): PSC_ACCZ_I to 2 x MOT_THST_HOVER and PSC_ACCZ_P to MOT_THST_HOVER
Since your MOT_THST_HOVER is 0.15
try setting PSC_ACCZ_I to 0.3 and PSC_ACCZ_P to 0.15
Tuning guide also states that
AltHold starts to oscillate up and down the position and velocity controllers may need to be reduced by 50%. These values are: PSC_POSZ_P and PSC_VELZ_P.
Maybe try playing with these parameters and see what works
I will also try to balance the props and the motor bells this week. And do a test flight to see if the vibrations are reduced. Then try varying the parameters you listed this weekend and report back.
Is this correct? Normally you would have 0.63
MOT_THST_EXPO,0.2
Set this then refresh the params
INS_HNTCH_ENABLE,1
then
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.12
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
INS_LOG_BAT_MASK,1
and send a link to that log file
If you want to experiment before getting to Autotune, I’d expect your “PIDs” to be more like this as a starting point:
ATC_ANG_PIT_P,10
ATC_ANG_RLL_P,10
ATC_ANG_YAW_P,6
ATC_RAT_PIT_D,0.006
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_P,0.12
ATC_RAT_RLL_D,0.006
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_P,0.12
ATC_RAT_YAW_I,0.05
ATC_RAT_YAW_P,0.5
Guys Yesterday I spent an hour balancing the props. Today I ran out before it got too dark to go a test flight and I’m very happy with the altitude holding with Loiter and Alt hold. I checked the vibrations, and the Z is now down to looks like 13 from 20 that mindprobe plotted.
I did get a chance to change PSC_ACCZ_I and PSC_ACCZ_P. I started out at 1.0 and 0.5 respectively and made one flight at 0.8 and 0.4 and last flight at 0.6 and 0.3 before it got too dark and my battery got low. I could not really tell any difference but nothing bad. Tomorrow I will continue to reduce both to 0.3 and 0.15 respectively. I’ll also enable the Notch filter recordings and report back as xfacta outlined.
Question how much variation is a well tuned S550 hexa capable of?
It seems to hold alt very nicely now even with a wind. The variation over the flight was maybe 2 ft. most of the flight was loiter mode about 2 m agl. the end was alt hold for landing
There was a couple curious yaw to the right about 45 degrees acouple times during the flight. It might be to fight the wind not sure.
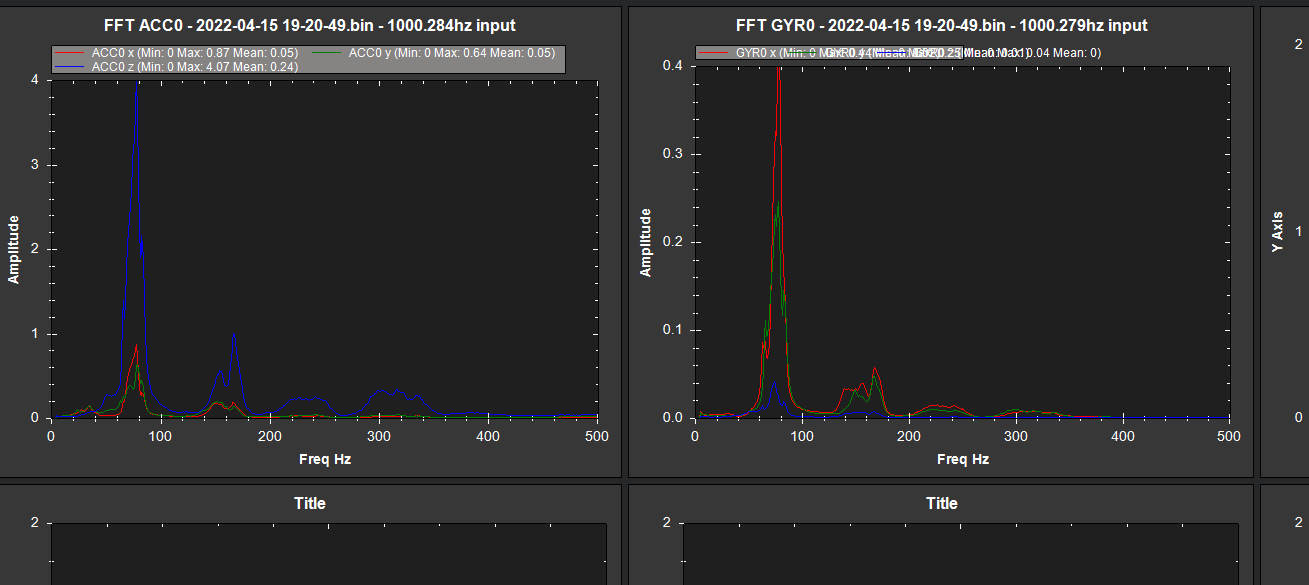
I discovered the FFT plots, Is there a way to see the spectrum after the notch filter so I can adjust the BW and ATT if needed?
By the way I appreciate the help and I’m learning.
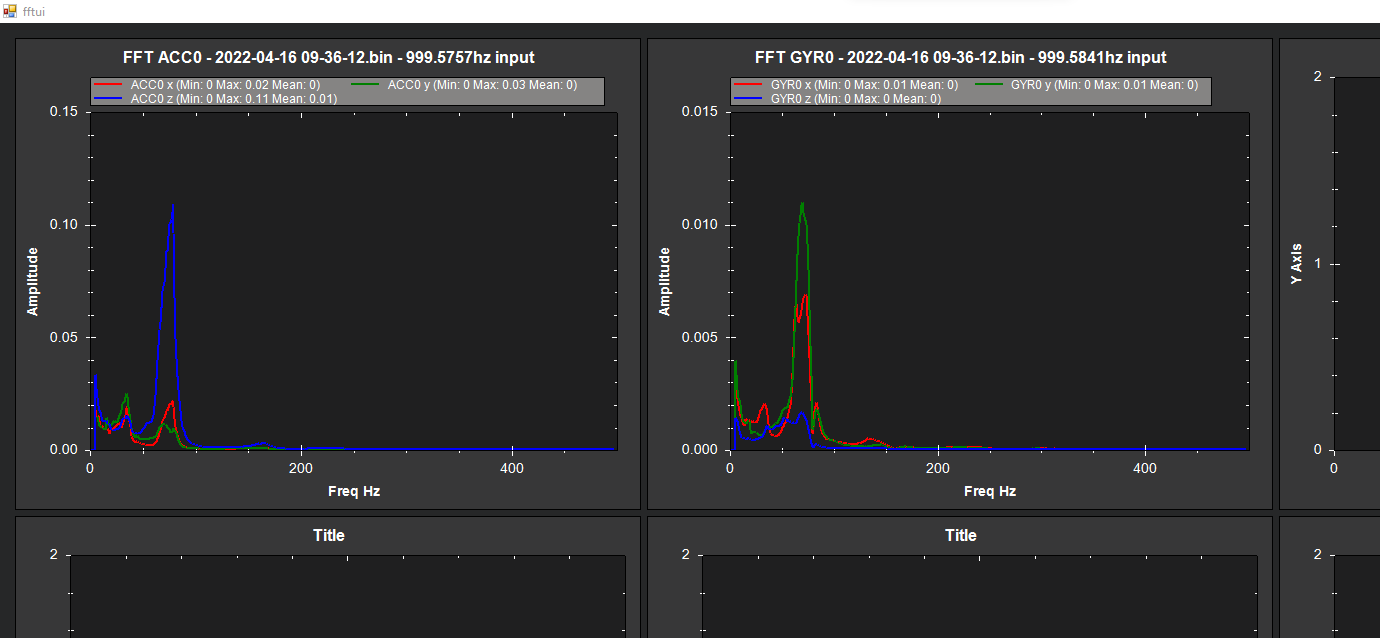
I made the change to record the post notch filter gyro data. Here is a flight 4-15 vs 4-16 flight.
Accelerometer values (dont know the units) dropped from 4 to 0.1 and the Gyro values (also dont know the units) dropped from 0.4 to 0.01, This seems to correspond to the INS_HNTCH_ATT = 40.
Are these values after the filter good or should it be lower? Bin file link at bottom:
Note 4-16 flight was actually 6-7 flights in the morning. From 9:30 to 11 AM.
I usually fly at dusk and today I flew in the morning. I see an issue with altitude hold as the day warmed up, I’ll start a new thread for that question. Does logging data for a long duration cause issues?
Thanks again for your help. I just wanted to know if tweaking the filter more has benefit.