Hi boys.i need help with my logs again.today after autotune my copter fly away.no respond on sticks.just GCS.(RTL mode)all what i can see is RC2 went below 1400pwm.EKF error .GPS as well.but first i wanna understand why few second after yaw autotune went thinks wrong.first autotune pitch and roll succes.i land and switch to yaw.thank you.
https://drive.google.com/file/d/1hZ4dV4DmCcLnmjgY-CqKFKEAN62yZEGl/view?usp=sharing
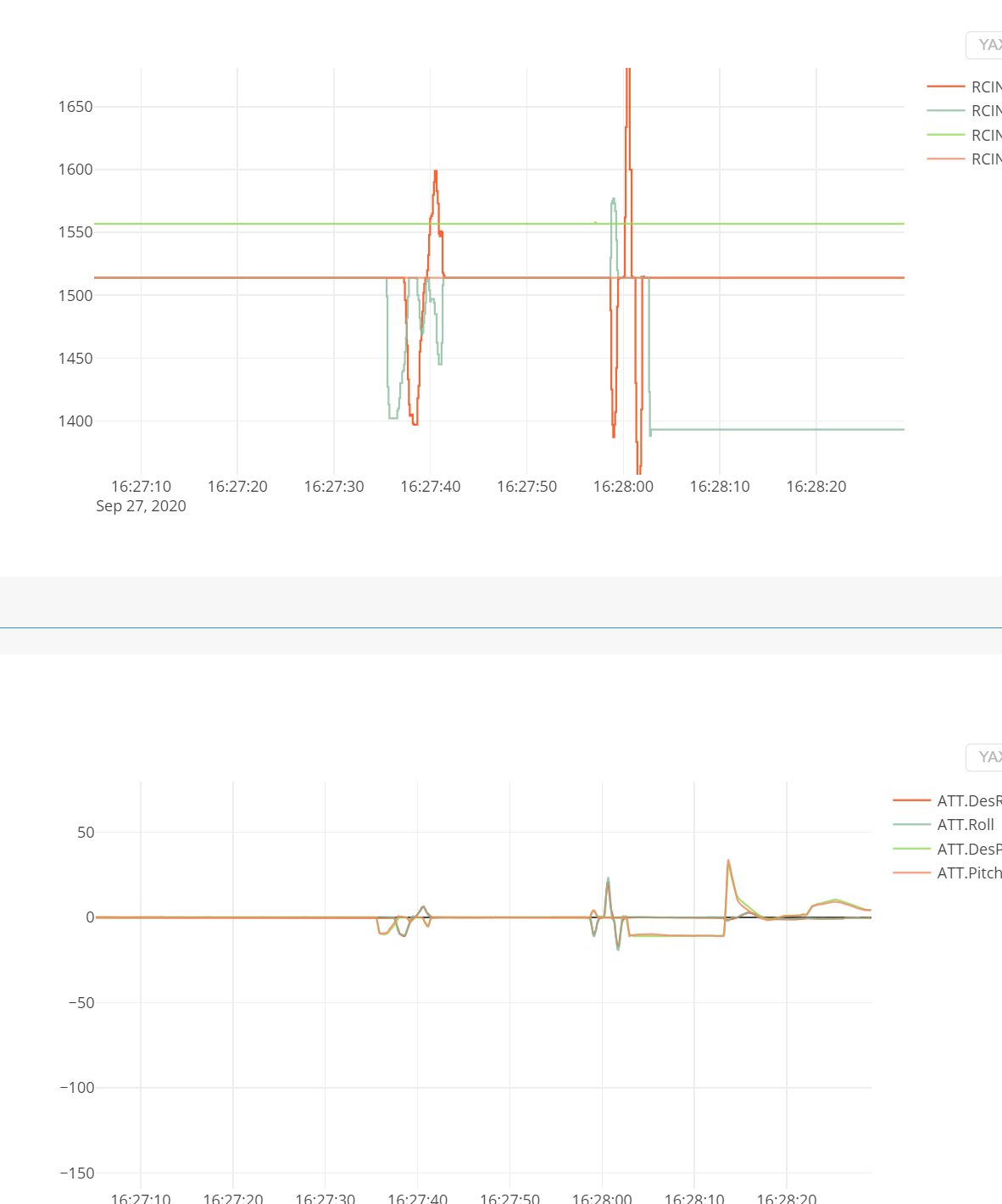
your FLTMODE_CH is set to 5 which is default, and FLTMODE1 is 2, which is althold, but the RC.IN5 is always 1122, So your flight mode is never changed during the whole flight time, check your transmitter setting and test it make sure the flight mode is changed successful.
I dont change flight mode during autotune.i mean ch5.when copter start flying away few second after autotune succeed message and dont respond on sticks i tried set 3rd flight mode witch is set to RTL.but no luck.then i change RTL via QCS and all looks ok.i mean RTL sequence.somethink similar happend to me before.so thats why i think that its somewhere there wrong.but maybe i am wrong.
Sounds like you had some sort of radio failure.
I am not sure.if this is what is only wrong ill be happy to replace it.its cheap rc anyway.but i need confirmation from somebody who can analyze logs better than me.
check the radio input on the gcs,flip the switch,check the ch5 is change or not?if setup is right,could be a transmitter’s switch broken
Why you trying direct me on CH5?i cant see any point looks at it.
Sorry i missed the point, I’m focus on the copter is only response by gcs, and i find the copter is not totally not respond by the stick
so if you try to change the flight mode by the transmitter, the ch5 is will be changed. i’m trying to find if it’s a trnasmitter failure.
Thats right.its like “frozen” RC input.rc2 is feeding pitch all time.i think in land mode as well.not sure.i am away from my pc.
If i change flight mode by transmitter,CH5 will be not changed.