Just to bring it to your Attention, not present in Beta 1&2 but observed quite a few little motor cuts only in Beta 3 and only in GPS Hold - about the duration of the little kicks switching a flight mode that sometimes occur.
Thanks for the report.
Are you using DShot by any chance? If yes then we should probably get @andyp1per involved. I think it would be good to see an onboard log if possible.
A log would be good. What flight controller, firmware, ESC and BLHeli versions are you using?
Also please post all your parameters
Also would be interesting to see @SYS/threads.txt, @SYS/tasks.txt and @SYS/dma.txt you can ftp these using mavproxy. You should first ftp them before flying then fly to demonstrate the problem then ftp again as the stats are reset each time they are retrieved.
If this only happens in EKF modes then that points to something other than dshot @rmackay9
1 Like
Yes, DShot, Nothing has fallen from the Sky yet and we should know if it’s across the board for DShot tomorrow.
I have seen this behaviour before with high CPU load - for instance setting INS_GYRO_RATE = 1 on an F4. That would be more specific with this being mode dependent. Does that sound likely?
Yeah, I’m not pushing this thing, loads in the 40’s%
I’ve backed it down since it did a watchdog reset - It’s pretty crap handling propwash, not that it was good before, little H7 with a mpu6000 will help things soon.
This problem was with no other changes just a flash to Beta3 so I don’t see that loading it much more.
But you said beta2 was fine? There were almost no changes between beta2 and beta3
Indeed, beta 1 and 2 were 100% fine Beta3 and instantly got these little motor cuts, just like little glitches, too fast to make the quad drop and only one at a time randomly
It’s something to do with POS Hold (GPS) for sure
I saw this today, and it’s something I’ve seen before many times in the past. It’s not really a motor cut, more like a control blip. I get this when the EKF does a yaw reset and I suspect its somewhat related. I think on larger copters the blip is above the control bandwidth and so you don’t really notice, but on smaller agile copters you get this twitch. @rmackay9 I don’t think this is anything to do with dshot.
1 Like
@andyp1per, ok thanks for investigating. If you’ve got a log, I think @Leonardthall and I could investigate. There’s a known issue (somewhere on the issues list) in which the controllers don’t handle the EKF’s altitude reset.
@Redshifft if you get a chance to download a log that would be great and we can then investigate further.
![]() Yup, it would be missed by many anyway.
Yup, it would be missed by many anyway.
You only need to compare the difference in the Beta2 - Beta3 code, but I will try to get you a Log if it will help.
The first log you have no sats so all bets are off. In the second log all motors go high so not a dshot problem. The position innovations go very high just before the twitch, so I suspect EKF/GPS/Vibration related, but perhaps someone with greater insight will be able to diagnose better:
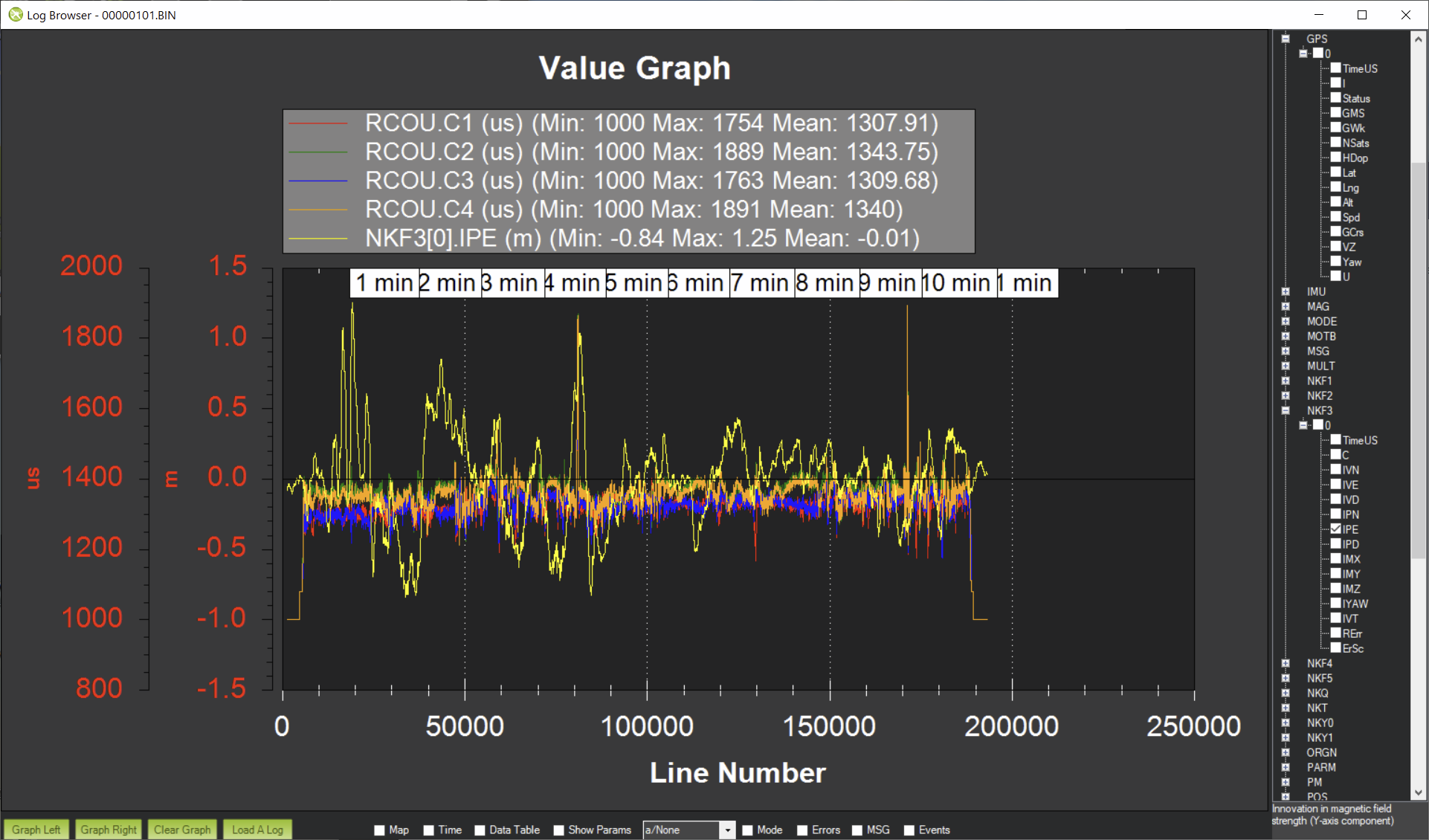
What does that mean?
Innovations are EKF errors related to different measurements. Generally these should be certainly below 0.5 if not more. Above 1 and the EKF will stop using that information source because its too noisy.