Hello, when I fly my drone in althold mode, it usually moves to the front right, when I put it in Loiter mode, there is no problem. I have adjusted the center of gravity as well as possible, could a small balance disorder be causing such a problem? Does it cause a problem in autotune flight and autonomous mode?
Read the Wiki about Flight Mode Altitude Hold. It’s stability control with Barometer Altitude Hold. There is no position control, wind will influence this. You control the position.
1 Like
First check there’s no trims set in your transmitter.
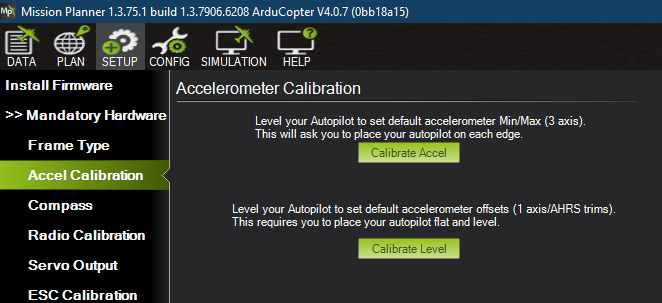
Connect to MissionPlanner
Set you quad level across the top of the motors, or if the landing gear is all perfectly equal length then set it on a perfectly level surface - use a spirit level to check, don’t just assume the surface is level.
Once you are happy the quad is level in every direction, hit the Calibrate Level button in MissionPlanner
1 Like
Thank you, I’ll try it when I get back from school 
I also did all the calibrations while not on the pixhawk 4 drone (the compass overlaps, I made the compass again) do you think this will affect it?
Yes, I read it 2.3 times, but I hesitate a bit because there was not much wind in the air