I apologize for asking for help here but I have an ongoing problem with a tailsitter which to me is just not explainable.
Here is a link to my posting in arduplane 4.1
No-one seems to want to take up a challenge and hypothesize why my plane did un- commanded actions. I have been using the online tool and it is very revealing and helpful, but I can’t discover why my plane Q-RTL , then rolled on its back and flew away un-commanded doing rolls till it got so far away, I had to disarm and crash it for safety reasons. So any help in analyzing my log will be greatly appreciated.
In the video I only noticed two motors, but in your setup I see you have L/H, R/H throttle setup (servo 5&6), along with traditional throttle (servo 3).
Assuming you are only using motors on Servo 5&6, I would have a look the right motor (servo 5). When things go bad, the current draw seems to match the left motor (servo 6) better than the right. ESC calibration? Or some other ESC imbalance that is only showing up during the higher power demands of transition?
Hello again, I noticed the link to a video showing my last flight was incorrect. Probably if you had been able to view it, your reply might be a bit different.
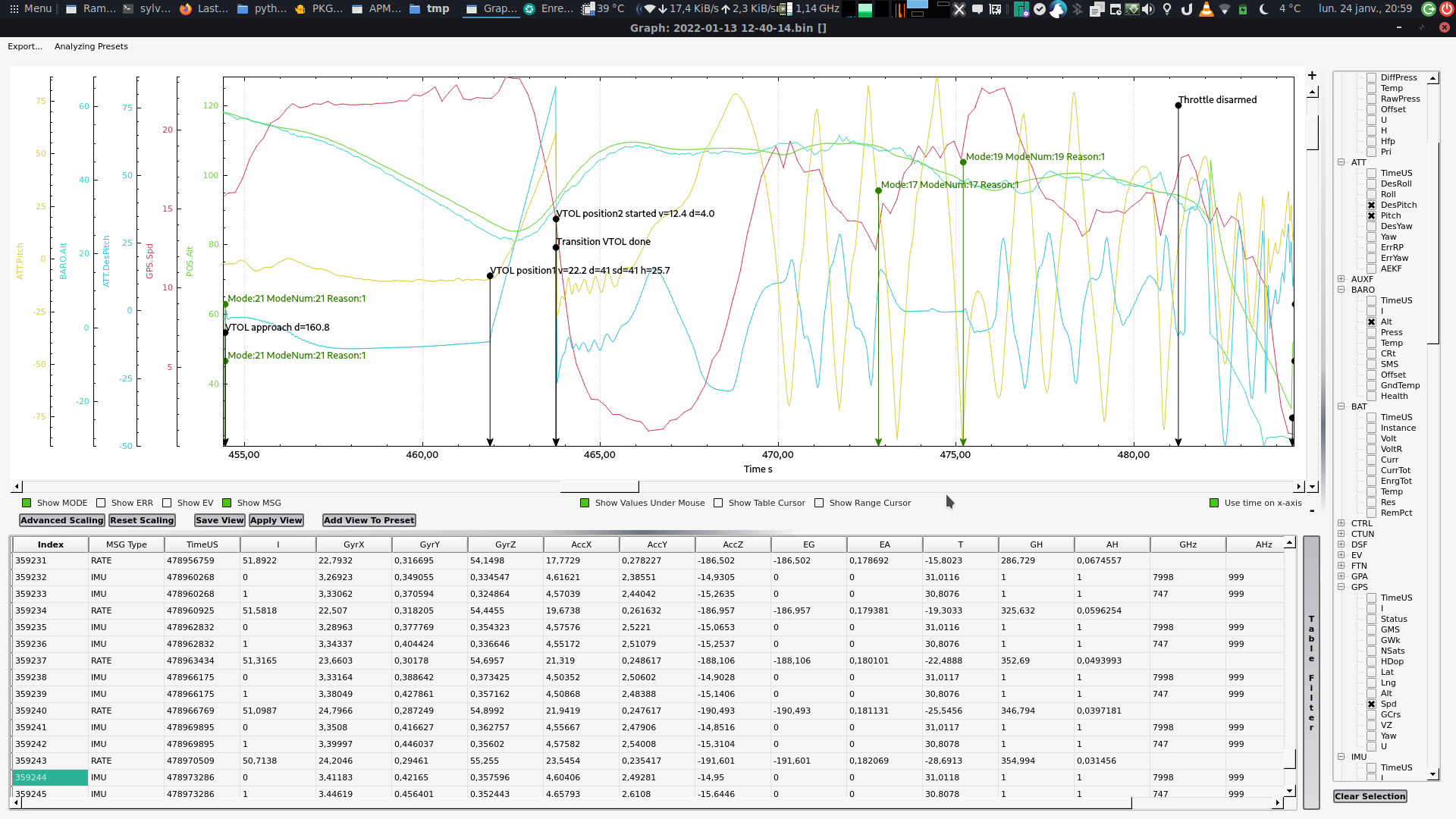
Is your post above referencing the log file I uploaded 23rd Jan. I can’t see the plane is tail heavy, I set it up to be slightly nose heavy, hence the UAV Log viewer reflects this. After rtl was selected the plane returned, transitioned to vertical, then fell on its back and flew away from me rolling. The action was un-commanded. The plots of pitch, Des pitch and Roll, Des Roll all look good to me. Then at 7mins:43sec, after vertical transition, it all went wrong.
Allister, What you describe was correct. Previously, I found one esc and motor speed rpm was substantially different and this is the reason the plane crashed. Even recalibrsting esc had no effect. Replacing the esc fixed the issue. This was rectified before this fly away problem occurred.