another test.
The problem I encountered is the the boat can not stay stable speed when there is a current or wind, it can not accelerate to CRUISE_SPEED.
I think CRUISE_THROTTLE is not necessary. when there is current or wind, the CRUISE_THROTTLE is incorrect. is it possible to do like car’s Cruise control, do not use CRUISE_THROTTLE .
Another problem is that the speed(displayed in mission planner) of boat fluctuated seriously. maybe the speed calculation has some problem.
2 Likes
Hi Ben,
This is the first time I have seen somebody else using a proper outboard motor, very nice!
What steering / servo system do you use?
Do you have a video of your craft?
What is the top speed of your craft?
Regards
John Easton
FishTec
South Africa
Ben,
If you can upload a dataflash log I can have a look…
Hi, i will find the log and upload.
Hi Fishton,
I used a customized servo(200kg/cm,±45°,0.23s/60°), and i think it’s suitable for outboard motor.

Have been doing some more testing with the new craft …
It appears to be a over run on the waypoint then a desperate attempt to get back on track.
The only solution I can see going forward is to drop the speed long before reaching the waypoint due to the speed and momentum of the craft.

Here is a video of the craft to give you an idea at speeds between 14-19kph
1 Like
Very nice. Looks like a very stable boat
Thank you David, yes, she is very stable, but with a bit of give where it needs it
First 6 hour test today calm conditions …
1 Like
Is there anyway you can outfit the boat to keep the outboard stationary and put rudders on the outer hulls? Your picture of the track looks better than others I’ve seen. I’m still interested in why it is worse in one direction than the other. Maybe a dagger board in the main hull would smooth things out a bit. Once it gets going straight it looks good. But then again it has huge problems in the cove. I think this vectored thrust steering with a single screw has some problems. Not Ardupilot problem but basic Naval Architecture problem. Once it gets going straight, for the most part, it hold course. But your boat should behave better than this to be considered working properly
David,
If there was any kind of basic Naval Architecture problem with the concept of the design or propulsion, it would be a constant problem.
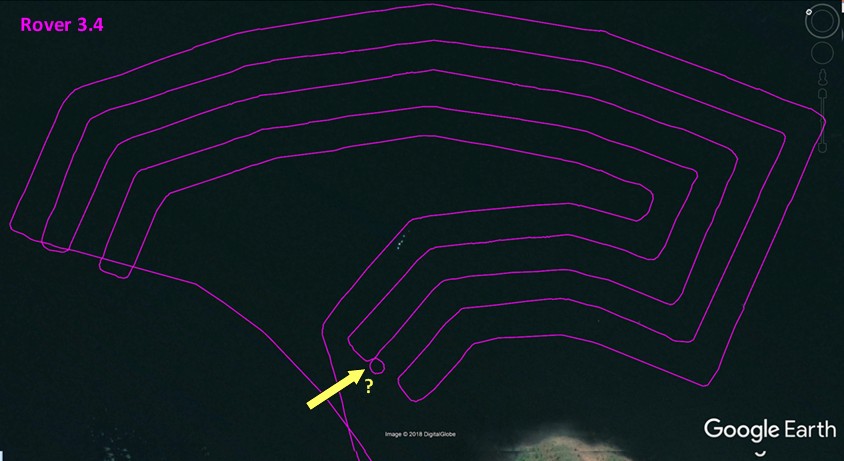
The fact that the craft was capable of this extremely accurate trail, except for a small glitch on a single waypoint when testing the Beta Rover 3.4 tells me there is nothing wrong with the hardware or craft itself.
I have total faith in Randy, and we will get to the bottom of this.
The single biggest problem with Rover firmware and my craft is MOMENTUM due to the size and speed of the craft. Coming right off the gas at least 30m from the waypoint I believe is going to be the solution.
Hi John,
Do you have a DF log I could look at? Maybe we can try setting the deceleration to be really slow so that does what you describe - i…e come off the throttle really early.
I want to get the sailboat support into master (we’re almost there) and then I’ll come back to have another look at the vectored thrust stuff… maybe I can think up a few tests as well so we can verify that the boat behaves as we expect… maybe our model of vectored thrust is not actually a good match.
1 Like
Hope you get it figured out. Again, nice job building the boat.
1 Like
Will do Randy, let me know when you are ready.
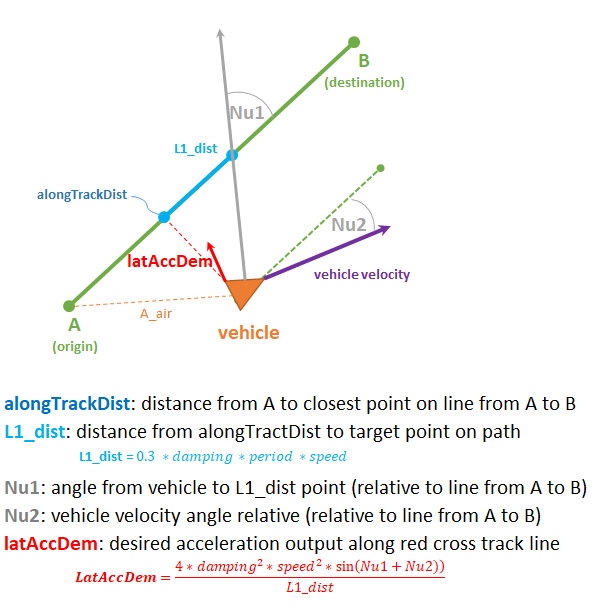
@Fishton, what are your navigation parameters - L1_PERIOD, L1_DAMPING, WP_RADIUS, WP_OVERSHOOT and your turning circle?
See Randy’s recommendations above, that is what I am using.
OK, so:
NAVL1_PERIOD: 8
NAVL!_DAMPING: 0.9
WP_RADIUS: 10
NAVL1_XTRACK_I: 0.02
WP_OVERSHOOT: 1
ATC_STEER_FF: 0.8
So here’s my theory:
Your combination of L1 period and low forward speed give you a look-ahead distance of only 6.5m (at 3m/s). If the boat gets even a little off-track, it’s trying to turn back on track quite quickly.
How quickly is determined by the damping - you’re actually commanding more than your TURN_MAX_G in desired lateral acceleration because your damping is so high.
The other odd thing I noticed is how low your FF gain is - by my reckoning and experience, FF should be your turning circle, so it your case I’d estimate 10. Throughout the whole mission you’re getting low amplitude oscillations in the steering. I’m not 100% confident on this though, because you’re basically maxing your steering during the oscillations so I can’t see how MORE gain would help.
I would increase your L1_PERIOD to something around 15, and drop the damping to about 0.75 or even lower. This will increase how far it looks ahead and will make it turn back onto path more gently - hopefully more consistent with its performance.
Do you have the ability to test locally? What will exercise this is starting the mission with the boat at 45 or more degrees to the mission path - that will introduce and initial error that it will have to correct. Try that with your current settings and see if you can reproduce the weave.
The L1 parameter maths is all here - http://ardupilot.org/dev/docs/rover-L1.html - but the guts of it is this:
I’m a bit worries about your steering PID values. Have you tested it in ACRO mode (just make sure you drop the ACRO_TURN_RATE to something that’s achievable (like 20 or 30 degrees / second) for testing otherwise you’ll go mad.
Sorry if this is ground you’ve already covered with Randy.
1 Like
Thank you for the time and effort you put into your reply mroberts.
It was good to read through the Li Navigation documentation again.
In the latest testing it appears the craft is doing very well most of the time while on track between waypoints, especially when they are far apart.
The problem comes in when the craft hits the waypoint then overshoots it horribly, then it’s like a game of catchup trying to get back on track correcting oversteer, but once it is back on track all is good, until it hits the next waypoint and it all starts again.
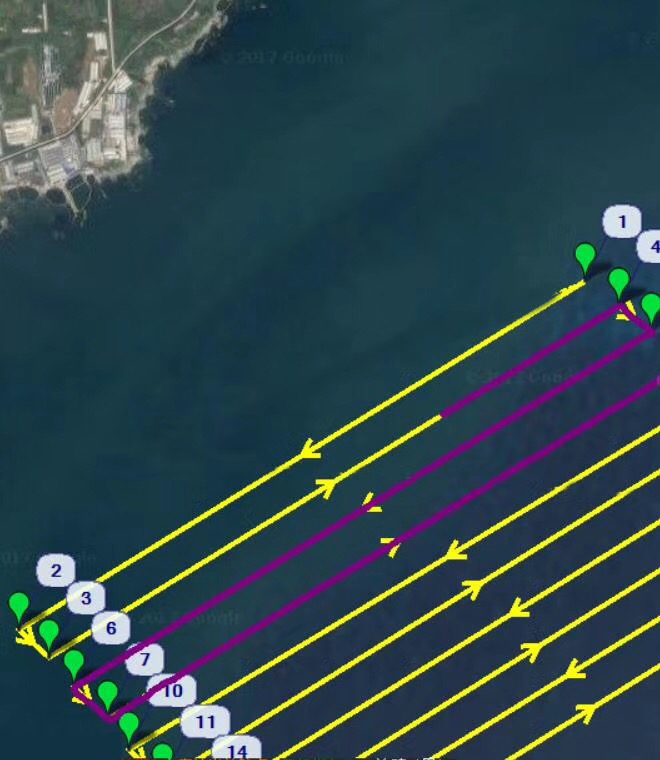
Here is an example of the flight plan in yellow and the actual trail achieved by the craft, the biggest thing to notice is that the turning circle of the craft is 25m radius / 50m diameter.
This causes the biggest problem on right or acute angle course changes.
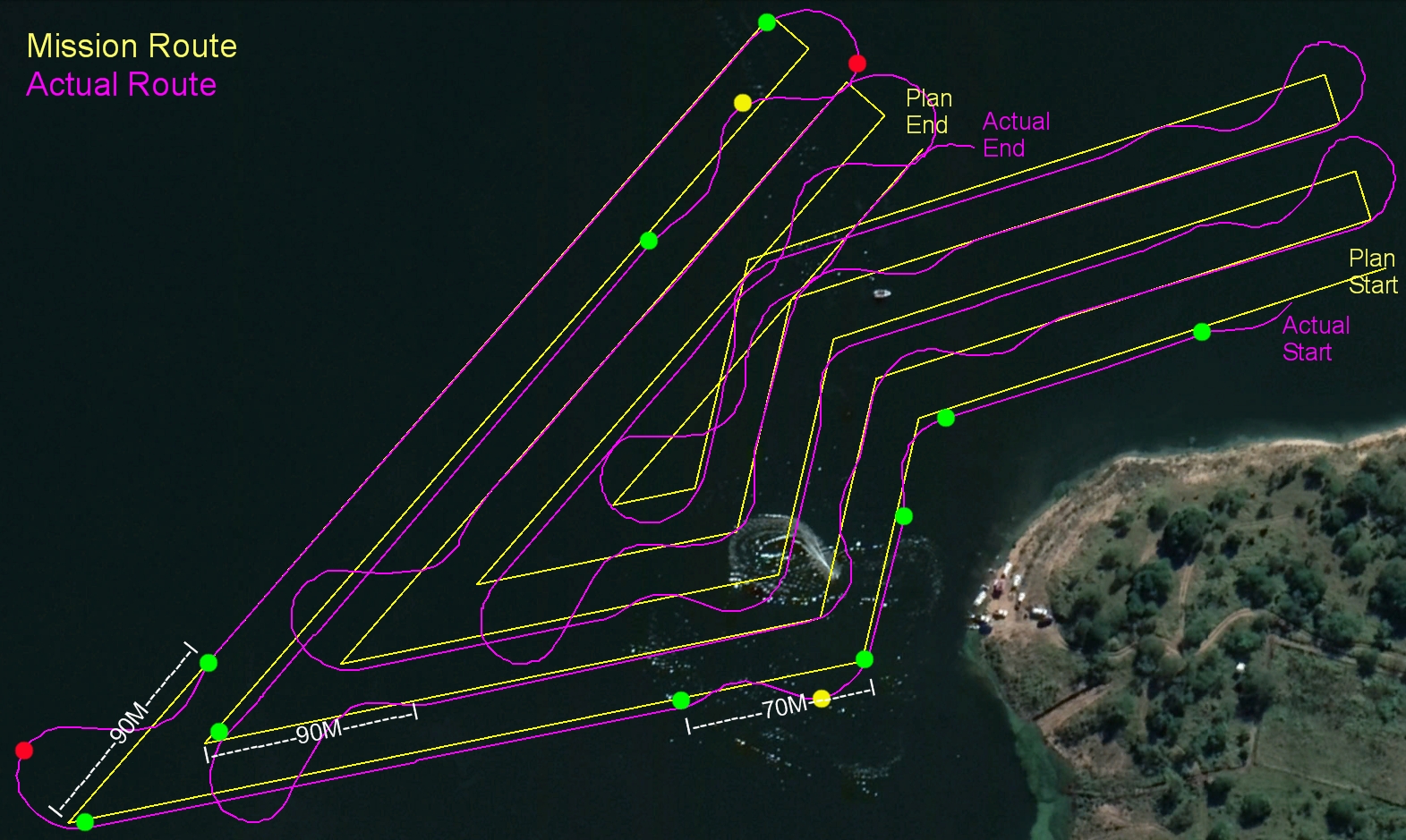
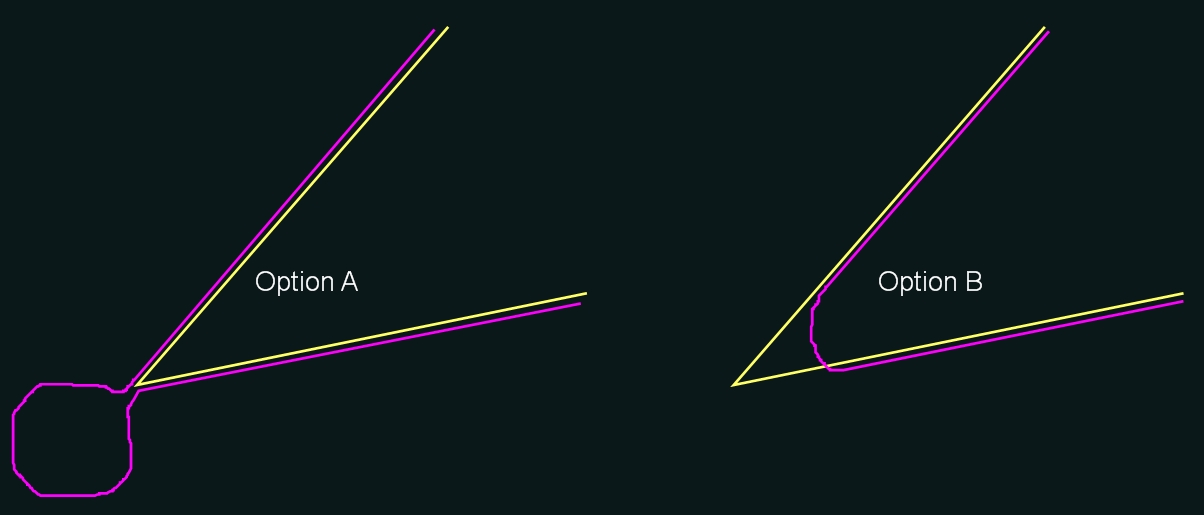
If one to actually drive the planned route as a human, you would use one of the following options -