I have recently finished my build for my autonomous drone. I am running a Navio2 raspberry pi hat with a lumineer 50A ESC, an Frsky receiver and a 915 MHz Mavlink module for telemetry. It worked great with no issues except for a flimsy frame and unefficient motors. I switched frames and motors and everything and also went from a 4 cell to a 3 cell battery due to the motor specs.
At this point, once everything was complete, I went to test and everything spun up fine and it flew. The only thing off was the tune which caused me to not want to bring it higher than a foot off the ground but it still flew. I brought it down to work on a different project for a little bit and then went back to it.
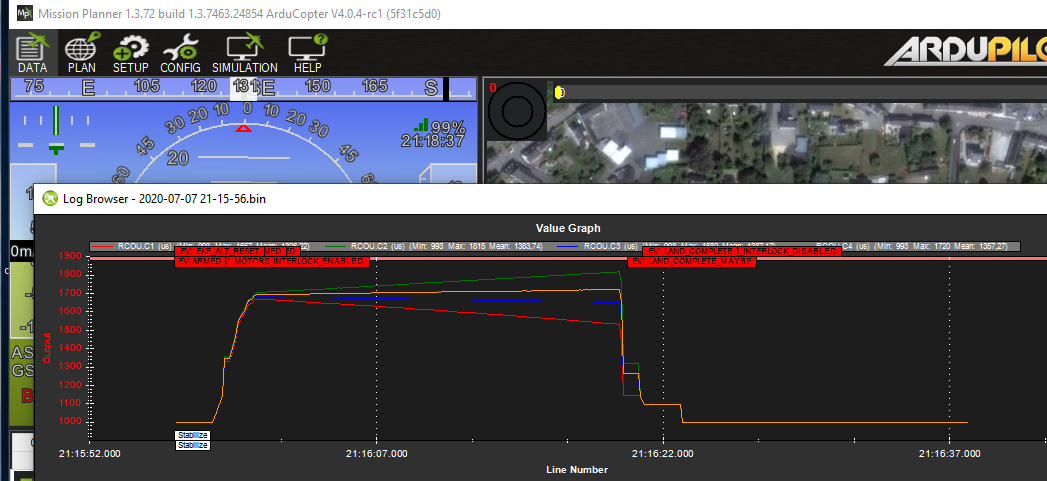
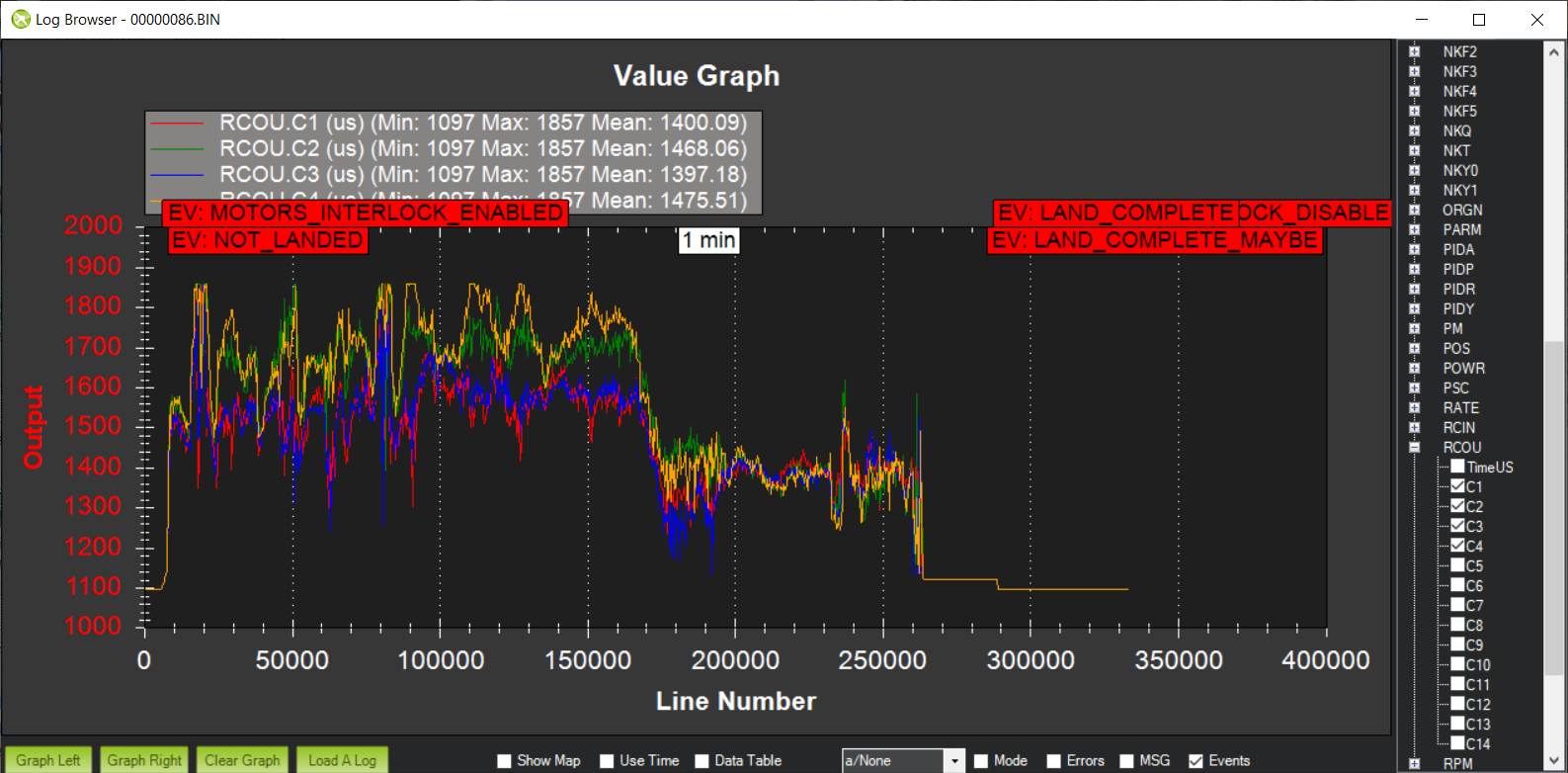
When trying to turn it on again it would not work. The software and the LED on the Navio2 board both tell me that the system is ready to go and armed/disarmed when I perform the respective tasks. I attempted to connect it back to mission planner via Mavlink and it would not connect at all. I finally, after several attempts and hours, got it to connect.
The problem now is that every time I go to perform a motor test it sends it into ESC calibration (red, green, blue flashing LED). I have performed an ESC calibration several times and it does the same thing every time. It seems like it wants to work but I am not understanding what the issue is.
I am running DSHOT 600 ESC protocol and I have testing my signal wires around the ESC and Raspberry Pi. Everything is working fine and has the correct amount of power. The receiver also connects to the controller and the camera works fine, thus allowing me to make the assumption that it is a software issue.
Revert to standard PWM protocol. Navio2 is “not” compatible with DSHOT… Oneshot 125 work with arducopter 3.5.x version, but there is a bug with 3.6.x or 4.x.x
It’s pretty clear from that thread that the difference is the IOMCU. If you are not on the IOMCU then the outputs are scaled, if you are then they are not. This is true of dshot also.