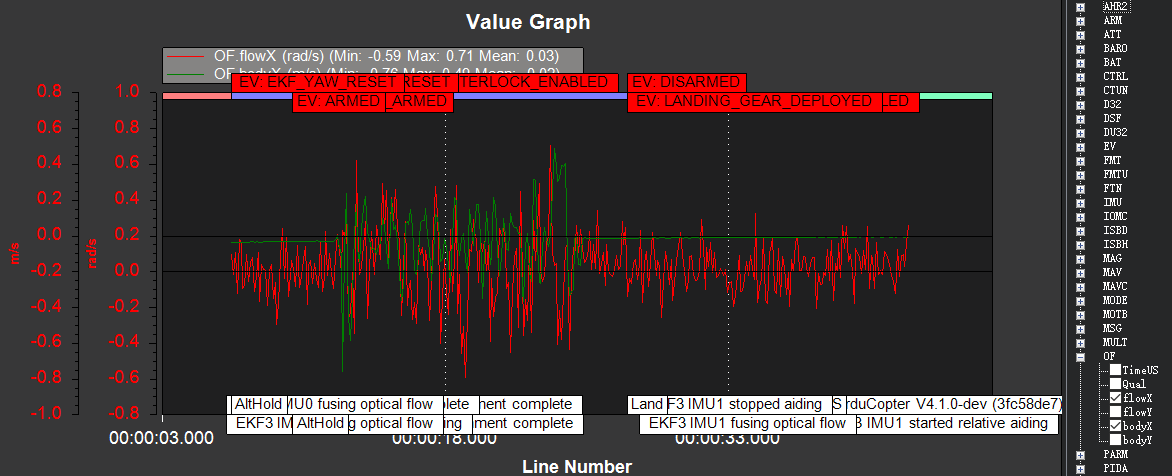
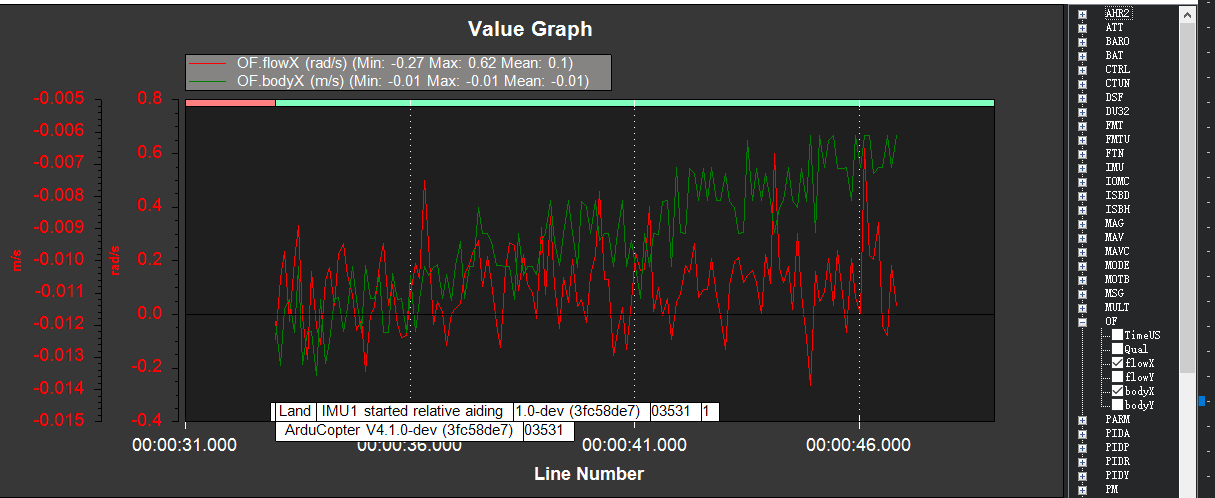
I used same param FLOW_FXSCALER to test Of.flowX and OF.bodyX.
But log graphs were much different,the first pic OF.flowX and OF.bodyX are closed,while the second pic OF.flowX and OF.bodyX are much seperated.
These logs are from tests you’ve done in which you are holding the vehicle and just rocking it back and forth? If not (e.g. if these are actual flights) then the two values won’t be close.
Yeah,I test it and just rocking it back and forth.these logs are not actual flights result.
OK txs. My guess it that the difference is environmental. Some possible differences could be:
- The amount of light or type of light. A dark room will mean the camera cannot see as much movement. Also florescent lights actually flash on/off very quickly and the camera can see these updates
- the surface was different between tests (perhaps one test was done where there were many features while the 2nd was done without features)
- the vehicle was moved slightly horizontally or vertically during the test
Anyway, if none of these seem to be possible then could you post an onboard log?
Calibrating the optical flow sensors is a bit difficult and we have it on the to-do list to add a more automatic procedure but that won’t be ready for 4.1 I’m afraid.
As you mentioned the three points,almost factors were considered in the test.
Before copter armed,I unchecked the opticalFlow.But I finished opticalflow adjustment.I don’t know that if uncheck opticalflow will exert worse influence on the fomer test.
another special copter performance,about 1/3 time,copter flied in FlowHold mode,it would fly better(slightly wobble and a little drift randomly).the other time,it can not keep stablize,drift alot.
And every time flight,I first used althold mode,and shifted to FlowHold mode.
Whether I should use FlowHold mode to test the copter?
OK, thanks. If you’ve got an onboard log I can have a look.
If the vehicle has a lidar then I definitely recommend using regular Loiter instead of FlowHold. As mentioned on the wiki, “Better performance can be achieved by attaching a rangefinder and using regular Loiter mode instead”
As copter instrcution,loiter needs GPS.but I damaged the it earlier.so this mode does not fit my copter.rangfinder I used is HC-sr04 sonic .And below is the log file.3 1970-1-1 星期四 上午 8-00-00.bin.zip (158.7 KB)

Ok thanks. Loiter does not actually require GPS specifically. This mode (and all other semi-autonomous and autonomous modes) will work with any position estimate source including optical flow, beacons, 3D visual odometry cameras, etc.
So could you try loiter instead? FlowHold really doesn’t work well for many vehicles I’m afraid.
Cause I test the copter indoor,so GPS module does not work at all.
I’ve added a to-do to our wiki to correct the documentation so that it more clearly says that Loiter and other modes can work without a GPS as long as another source of position or velocity (including optical flow+lidar) is available.
Hi @BryanFly,
I had a quick look at the log but it seems very short. It is only 14 seconds long so maybe it’s the wrong log?
this is test log that I consulted the instruction,So in fact copter did not fly.I just used hand and held the copter finished the testhttps://ardupilot.org/copter/docs/common-optical-flow-sensor-setup.html#common-optical-flow-sensor-setup
this link indicated
- Connect to your autopilot and ensure that logging while disarmed is enabled (In Copter-3.3 set LOG_BITMASK to 131071.
- Find a location with a textured surface and good lighting (natural light or strong incandescent)
- Remove Propellers (safety first)
- Power on the vehicle and hold level away from your body and at eye level
- Rotate about the vehicle in roll through a range from -15 to +15 degrees in about a second and then back again. Repeat this 5 to 10 times. By closing one eye you will be able to keep the centre of the sensor stationary against the background while you do the rotation.
- Repeat about the vehicle pitch axis.
- Download the data flash logs and plot the
OF.flowX,OF.bodyXandIMU.GyrXdata.
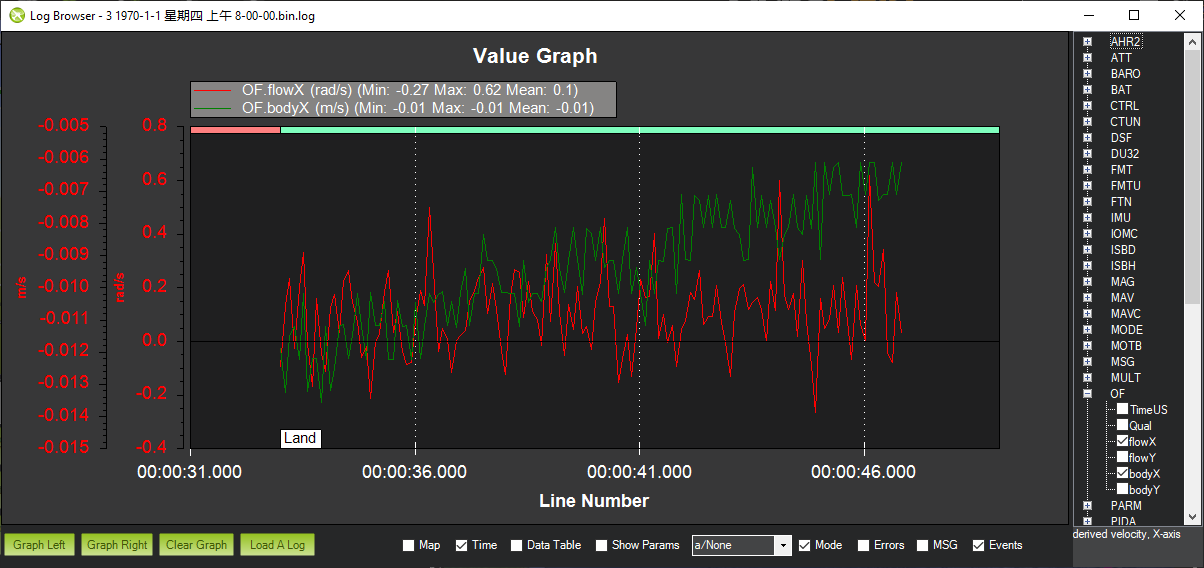
Very strange. Maybe you could try downloading the log that you’ve posted above and check yourself? This is what I see for the OF.flowX and bodyX values.
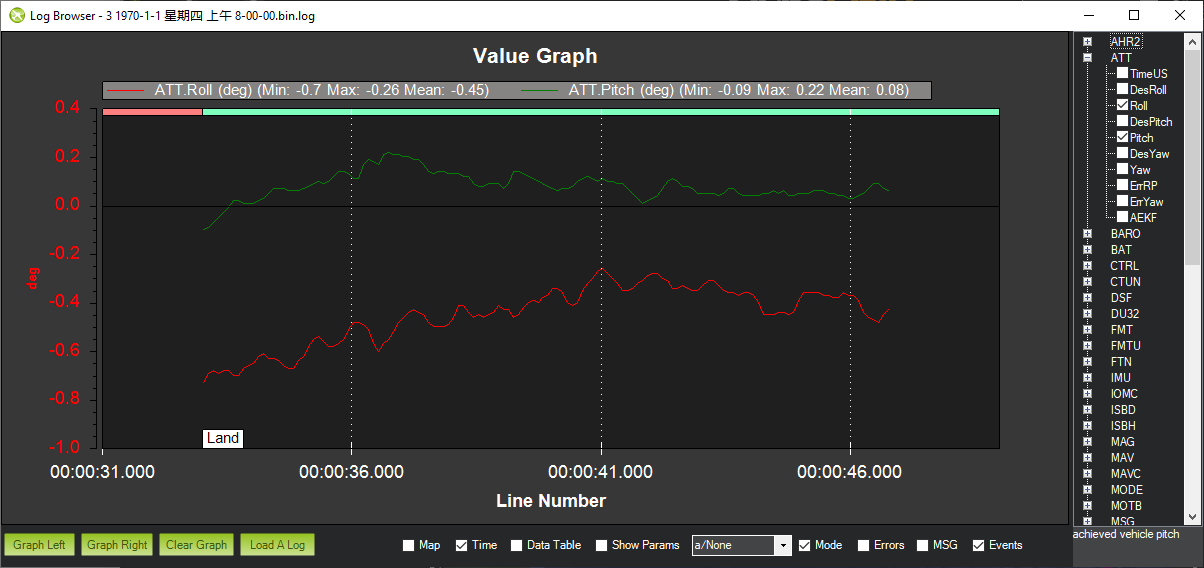
And here is the vehicle roll and pitch values so it doesn’t appear to be moving.
Strange indeed,in the past,I tried many times,but the log is contradict to the fact test.
And I adjusted the compass