Logs attached. I was flying happily in fbwa when suddenly it rolled and spiralled in from 100m. I’m trying to educate myself on log analysis and from what I can see it looks like servo, or at least mechanical failure but obviously I’m not confident. I had a similar situation about a month ago and replaced the cheap digital servos with futaba analog servos and all has been well for a few hours of flying time. Aircraft is a Skywalker X8, tuned via autotune, apm2.5 with external magnetometers, apm power module, minimosd, airspeed transducer, arduplane v3.0.3.
Any help greatly appreciated.
Anybody??? 
Need to get airborne again but not untill this is sorted.
Have I not asked the right question?
Is there a more active group for log file analysis?
Do you need more information?
Hi I recently had a death spiral as well, but my servos and the links were intact after impact so I’m still trying to find clues. I’ll look at your logs right now
Hi moose,
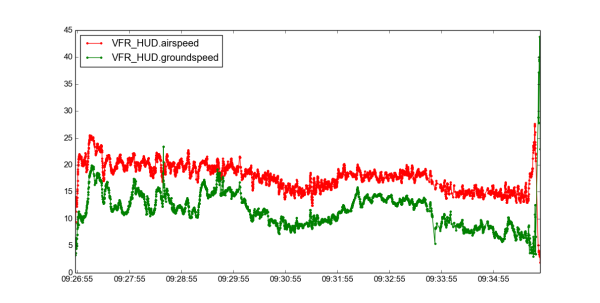
The issue is bad airspeed calibration. If you graph airspeed vs groundspeed over the entire flight (which includes both upwind and downwind sections) then you see airspeed is about 4m/s above groundspeed for all flight sections. That means airspeed is wrong by around 4m/s. That places the true airspeed of the flight at about 9m/s, which is below the min (and presumably the stall speed?).
The airspeed ratio is set to 3.8, which is way too high. If that came from an airspeed autocal (which apparently it did) then it means there is an installation error in the pitot tube or airspeed sensor. This was an analog airspeed sensor, and most likely problem is leaky pitot tube or kinked tubes.
Cheers, Tridge