In my limited experience with tuning my copters, a well behaved copter doesn’t necessarily show good results on the graphs. For example - this is a graph from a copter that seems to fly well:
I’m going to attempt transmitter based tuning to make improvements. I’d like to see the “desired” and “actual” lines more congruent.
And I’m expecting there maybe be oscillations in motor command (RCOU) that I won’t be able to detect visually. I read a comment from @Leonardthall on a thread about tuning that illustrated this issue. (a thread from about a year ago regarding autotune)
Perhaps the only feedback in flight is the visual (and aural) indications of performance. But I expect the process will go faster if it can be determined dynamically in flight.
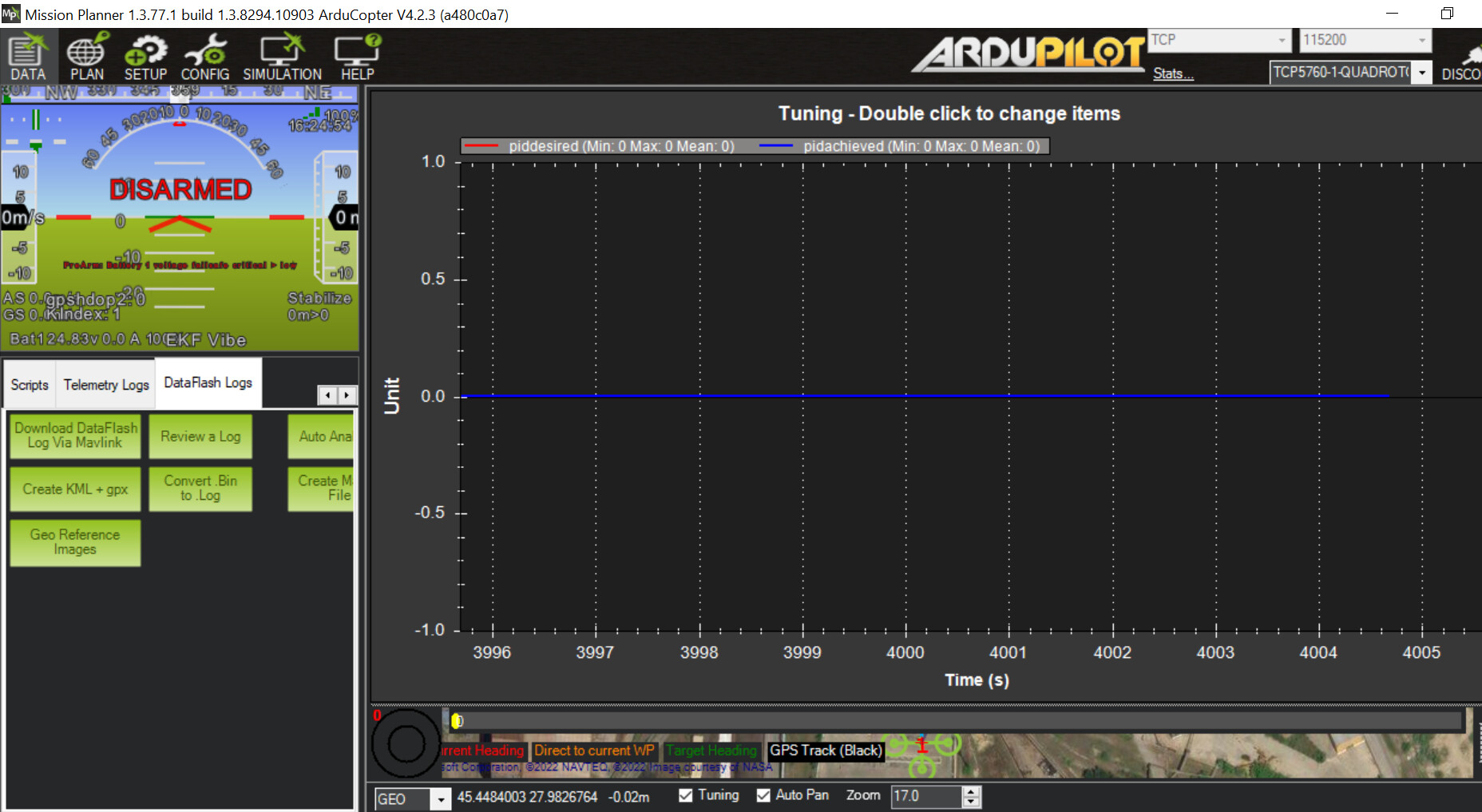
I have used the GCS_PID_MASK parameter for Rover to tune the steering by selecting pidachieved and piddesired on the MP Tuning screen. But I don’t think telemetry is fast enough for this to work well with Copter.
This is the screen I mean and the selected parameters.
I’m sorry - can you please clarify which “that” you’re referring to? Not sure if you mean the adjustment to the telemetry rates in Mission Planner or something else. Thanks.
The telemetry rates will be too low still and live acceleration is not that useful. Raw vibe information really isn’t even used for vibration troubleshooting any longer but when that video was released it’s all there was.
Thanks Dave - I’ll fool around with it and find out what I can learn.
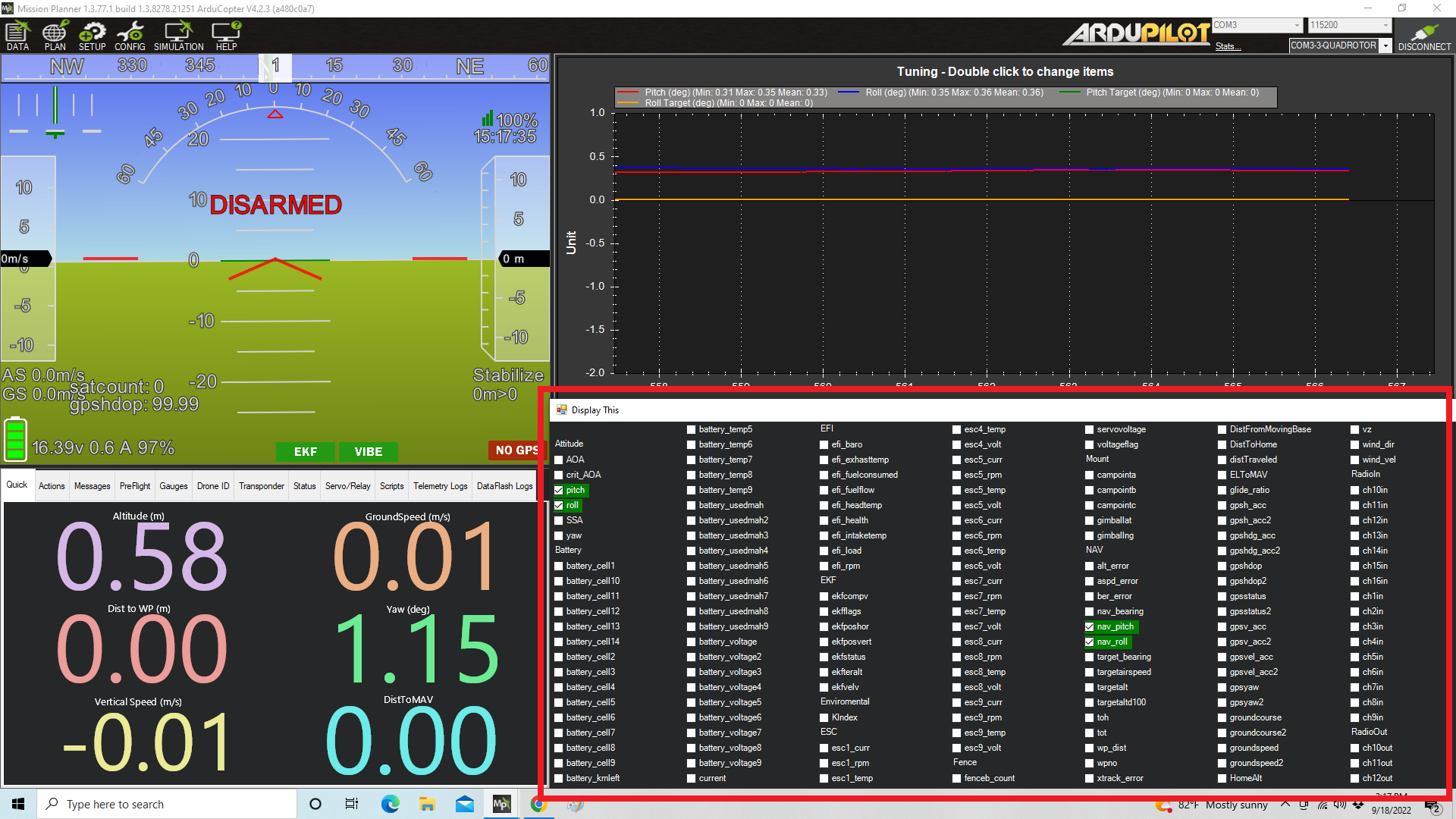
BTW - I hate to bother you with this too - but do you have any idea where I can information about the items in the “Display This” box that comes up when selecting “Tuning” on the Mission Planner data screen - and double clicking in the chart?
These aren’t the same parameters as what’s in the log files - nor are they ArduPilot parameters. I can’t seem to find any information about them.
Sorry to bother you about this - You’ve already been really helpful on this topic.
Right, it’s the same data as shows on the Status screen. I don’t recall seeing a description for all of these either. It helps that there are catagory descriptors but I don’t know what some of the values are.