Hello all,
I am setting up a new rover on a “Kraton 8S” platform. I have noticed that going in reverse works randomly, sometimes the vehicle does not respond and keeps still.
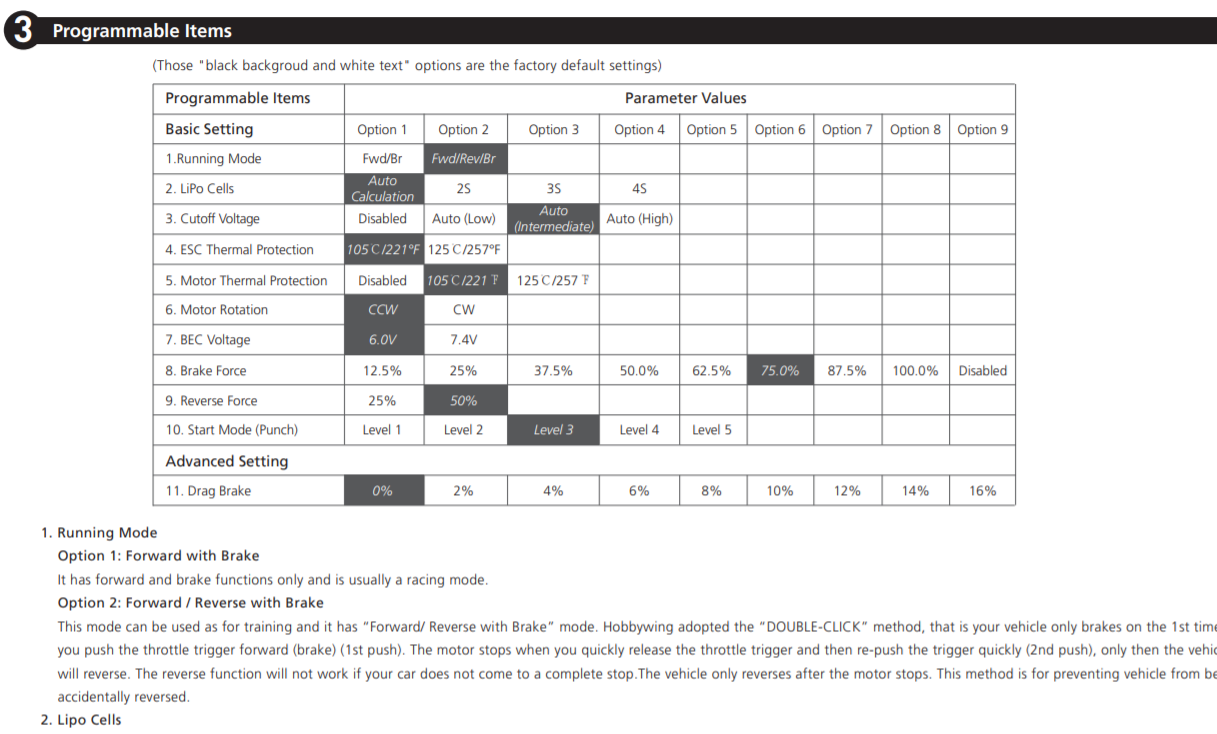
I have discovered that the ESC (Spektrum Firma SPMXSE1160) has only two running modes: Forward/Brake and Forward/Break/Reverse, and it is configured in the second mode. In this mode, it seems that goes in reverse only if, going forward (PWM high, above the neutral zone) , you go into the reverse/brake zone (PWM below the neutral zone), then set a neutral value around 1500, then go in reverse again.
I have read somewhere in these forum that the “forward/reverse” mode is the way to go, but I don’t have that mode available.
I thought that setting the parameter ATC_BRAKE = 1 will enable this mode, but it does not seem the case.
My question: is Rover compatible with this FWD/BRK/REV mode? it is related to the ATC_BRAKE parameter?
If so, something is not working properly in my setup as it only goes into reverse half of the times.
Any help will be much appreciated.
Thankyou in advance and Best regards!
Adolfo.
No. That parameter actually applies braking action in firmware. Useful if you have a fwd/neutral/rev mode.
thankyou for you reply! I understand then I need another ESC 
thanks for your help.
Adolfo.
Yes, best option. I have used Hobbywing ESC’s on a couple Rovers built from RC trucks.
Hello again,
I have contacted the seller of this Spektrum ESC model 1160CP and he told me that ESCs for cars do NOT have the forward/reverse mode, that I have to go to a ESC specific for boats. In particular, none of the “firma” Spektrum smarts ESCs for cars do have this mode, according to the seller.
His argument is that if you are driving the car at full speed and then ask for reverse, the motor will explode and burn into flames. It is a reasonable outcome, but I would design the ESC to first brake, then going into reverse (it does not seem so difficult), without the need to put it in the neutral zone, which is what I believe I need.
I understand @dkemxr for your reply that Hobbywing ESCs work fine, Could you please post which specific model are you using?
Thank you and best regards,
Adolfo.
I just posted on this topic about the same thing. Some car ESCs do support going straight into reverse but I don’t really know which ones.
Hi,
some RC race classes require different ESC setups. For example “blinky” mode, or no reverse. Forward/reverse mode is also the only way to get a skid steering vehicle to drive properly. I had Turnigy and Hobbywing car ESCs with their corresponding programming cards and they all had settings for forward/brake, forward/brake/reverse and forward/reverse. Even some cheap amazon brushed ESCs I have, have switch to select between f/b/r and f/r mode.
I now use VESC based Flipsky “skateboard” ESCs in most of my rovers. They got really expensive recently (like almost everything), but I can really recommend them. They support all kinds of motors (brushed and brushless, different sensors, lots of input signals, throttle modes, etc.)
I can understand Spektrums reasoning to limit the chances of user error, but it is unfortunate that you have to buy a new ESC now, only to get such a simple feature.
Hobbywing Quicrun WP1060 for a brushed motor and an EZRUN for a Brushless Motor. I don’t recall the model for the later and I sold that Truck. They offer the modes @count74 noted. And of course they are meant for Cars/Trucks. Boat ESC’s are typically water cooled. Find another seller.
Hello @dkemxr again,
I am sorry to bother you but I am desesperately trying to find a suitable ESC for our RC car, with no sucess so far. It has to be brushless, sensorless, 6S, with a 6V BEC for the steering servo, and having the FWD/REV mode.
Looking at hobbywing EZRUN as you suggested, all models I have found lack the forward/reverse mode.
For example:
HOBBYWING EZRUN MAX10 SCT, 120A, 1/10 ESC https://hobbywing.com/products/enpdf/EZRUNMAX10SCTen.pdf
the manual clearly state that they only have the FWD/BRK/REV mode and need a “double click” to engage in reverse, I think it is the same problem I have with our current Spektrum Firma ESC:
or Hobbywing EzRun MAX6 V3 160A 1/6
or Hobbywing EzRun MAX8 V3 150A 1/8
All lack the FWD/Rev mode.
Could you please tell me which specific model were you using?
Thanks a lot in advance,
Adolfo.
Yes, you are right. I don’t have this truck any longer and now I think I used a Xerun ESC. I also replaced the motor thinking to run it Sensored but there was a problem with this so I ran it Sensorless which worked fine. The only problem with this line of ESC is they are expensive.

I had a Hobbywing Quicrun brushless crawler ESC (I believe I ran it sensored). It supported Fwd/Rev mode. I do not remember the exact model.
It looks like the QuicRun WP 8BL150 would do the job.
You said "I now use VESC based Flipsky “skateboard” ESCs in most of my rovers. " - I have a question:
What autopilot hardware are you using, and do you use PWM interface to the VESC controllers, or do you use another interface? (CAN?)
I am selecting controllers for a rover. In the past I had good experience with brushed motors and the roboclaw controller (with PWM interface to Pixhawk+ardurover). But I have moved to brushless outrunners for my new rover. I’m planning on using VESC controllers connected to PWM ports on the Pixhawk. Is this what you do?
Do you have any experience collecting RPM, current and voltage from the VESC controller to the companion computer (RPi)?
Thank you,
Chris
Yes, I control the VESCs with a PWM signal. The VESC Tool makes it really easy to setup and calibrate the VESC, so it works really well with PWM. I did not try to read any data from the VESC so far.
There is a project/library called PyVESC to control and read a VESC with Python:
Thanks. My plan is to control with the Pixhawk-PWM-VESC, but attempt to capture data (mostly current) via I2C or UART back to the companion computer. Will keep you posetd.
Dear friend
I have a max 8 esc (hobeywing) and I am using it for forward and backward movement in pixhawk
check to make sure you have chosen the right esc in setup tab - esc callibration
I have set it on normal esc and not brushed or dshot
I can confirm that Hobbywing QUICRUN 10BL120 has Forward/Reverse mode.
150A model also has this mode, you can see it in the manual
Hello dear friend and thank you for your help
do you know how exactly steering mode work?
does it support reverse movement of vehicle?
when would it decide to go reversely?