I had a successful test flight on Sunday with ArduPlane 3.7 on a Navio2 with four waypoints and a rally point in the middle.
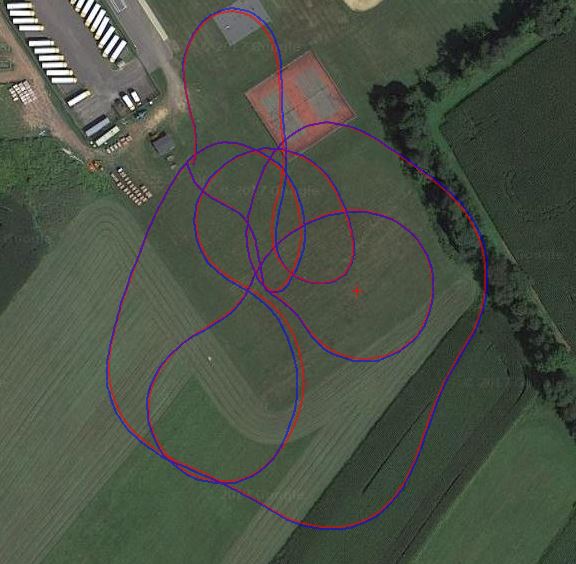
After the last waypoint it went towards the Rally Point and proceeded to fly a cloverleaf eight pattern with the Rally Point at the intersection of the three loops.
Can this be explained by problems with the compass, the GPS or some navigation settings like the loiter and or waypoint radius settings? (as per a tip by Michael Oborne in the Mission Planner forum).
Thanks,
Paul