Going through the docs for setting up filters, I came across mention of the INS_LOG_BAT_MASK in the “Throttle” section of the page: Managing Gyro Noise with the Static Notch and Dynamic Harmonic Notch Filters
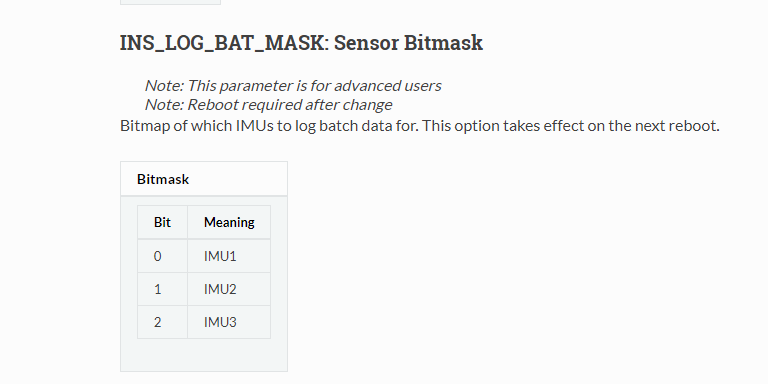
The docs say set this to “1” to collect data from the first IMU.
However, the parameter reference says option “0” is for the first IMU.
Can someone please clarify this - and which IMU should be used for data collection on filters?
Thanks!