Hi everyone. I’m a newbie for this field.
I have a question that I hope everyone can help me.
Now I am working with T-moto, Esc alpha and pixhawk.
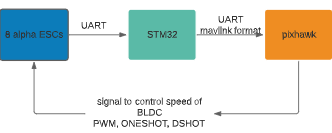
Our goal is to control 8 BLDCs by using alpha ESC through pixhawk. Because we have no clue how to get feedback signals from 8 alpha ESCs directly into pixhawk and pixhawk does not have enough ports for this.
Therefore, we are using microcontroller (stm32f407) to get those feedback signal and send them back to pixhawk by UART in mavlink format. (image is below)
I use Mission Planner to read that data that we send from stm32 and it is OK but it seems that pixhawk doesn’t understand what these data use to control for
.
Should I config some commands in Mission Planner or is it useless to send that data by mavlink? Could you give me some ideas to solve that problem or any alternative method to do that?
Big thanks to you.!
Have a good day!
Some people have been talking about converting T-Motor telemetry into something useful for years, and so far no solid outcome. It would be useful if you can do it.
The Alpha ESCs only accept PWM, you use a STM32 to collect data from the ESCs - would it be possible for you to replicate the BLHELI ESC telemetry so the data will be logged normally by ardupilot?
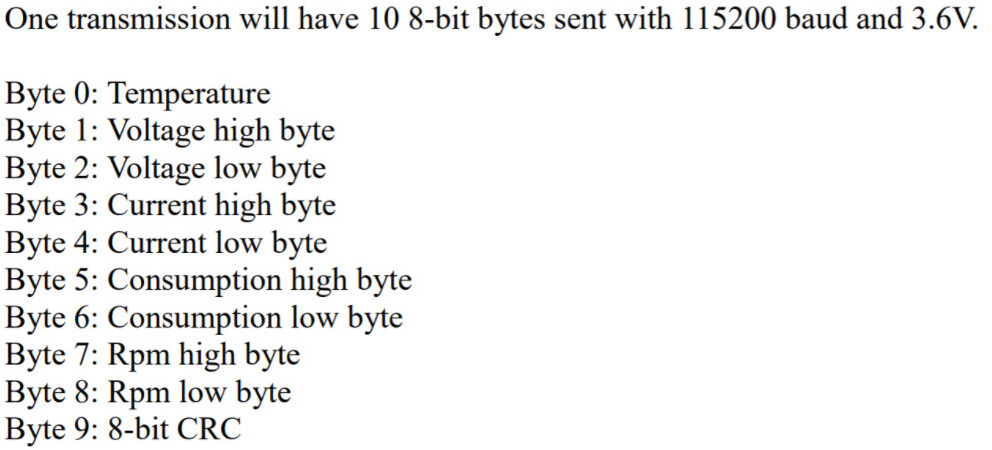
The BLHELI ESC Telem data is transmitted over 1 wire to a UART.
I have already tried to use BLHELI ESC telemetry but I haven’t succeeded that in many times, ardupilot didn’t received any messages. I follow data frame as the picture below
Which COMPONENT_ID and SYSTEM_ID are you using in the generated MAVLink messages?
Can you test setting the COMPONENT_ID to MAV_COMP_ID_PERIPHERAL and SYSTEM_ID to the SYSID_THISMAV parameter of your vehicle.
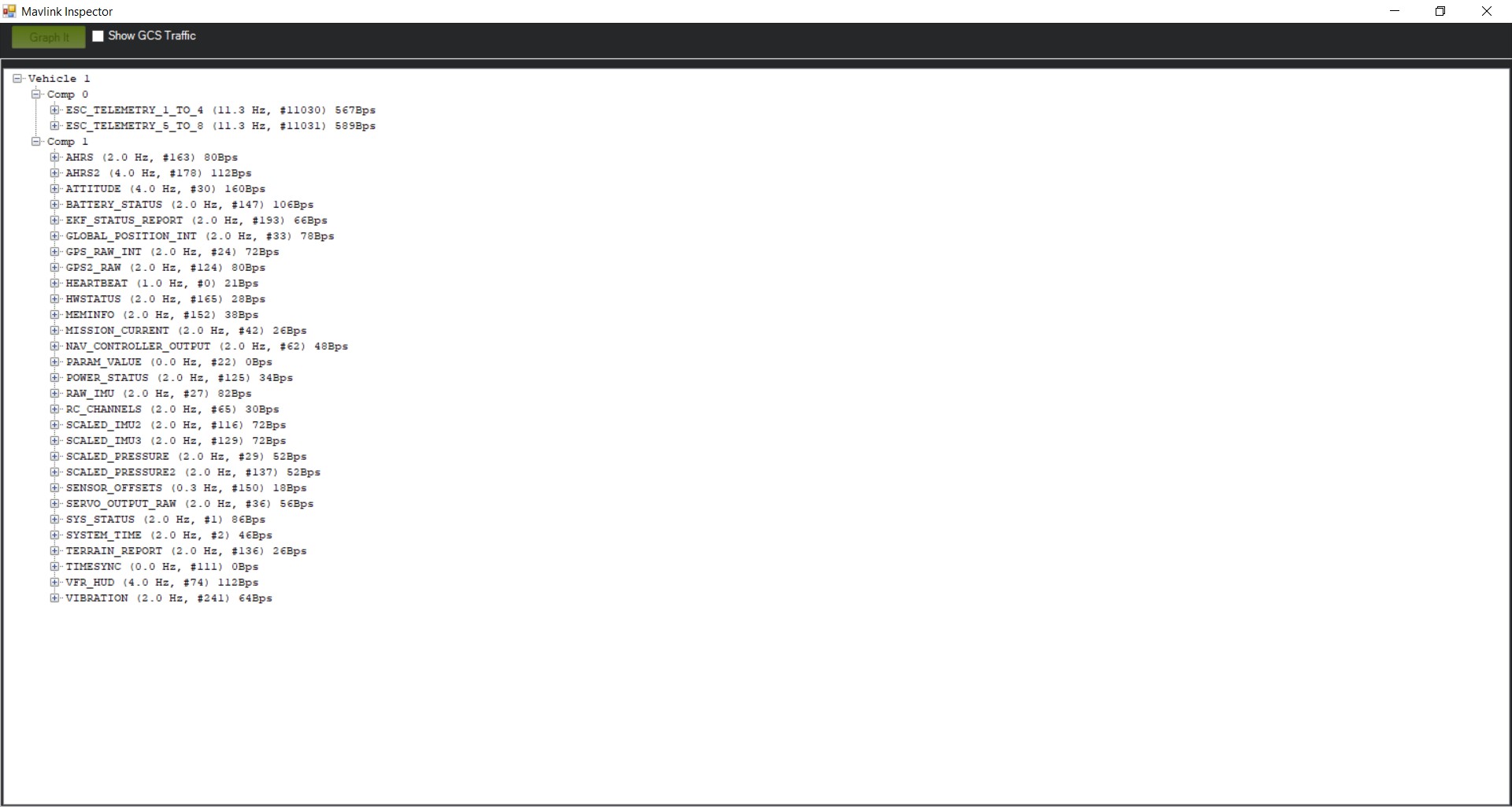
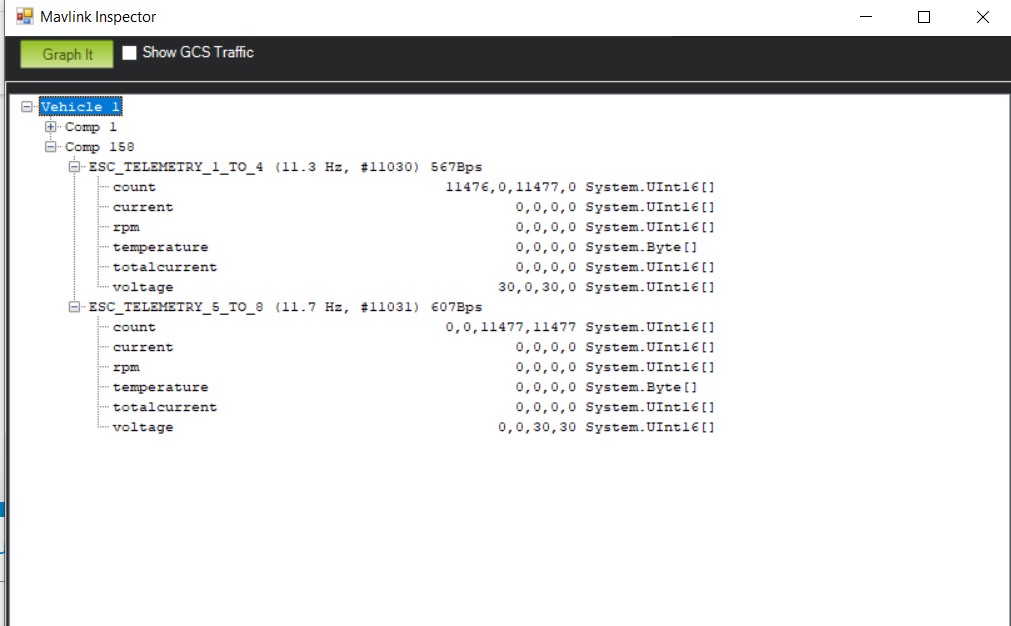
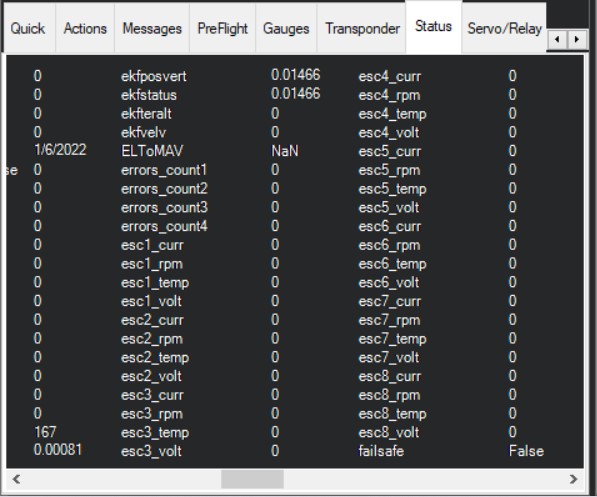
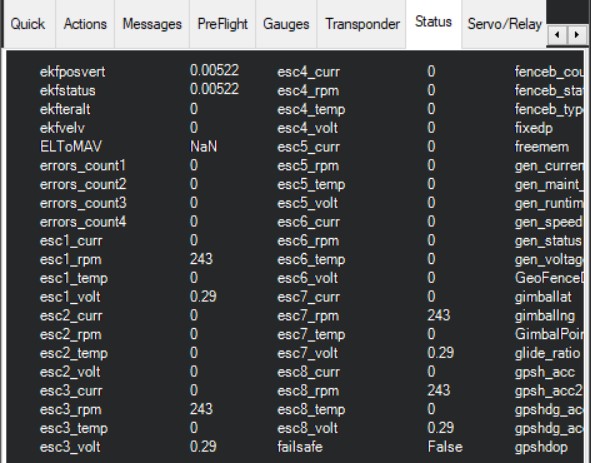
SYSTEM_ID in my vehicle is 1 so I change my code SYSTEM_ID: 1 and COMPONENT_ID: 158. In mavlink inspector show us 2 mavlink packet like the image below.
The test you made show that mavlink packet routing and forwarding is working fine. You get both ArduCopter telemetry and ESC telemetry inside mission Planner at the same time.
Now can you test github PR #19668 to see if the autopilot starts understanding those values?
If it does you can use the RPM values to control the dynamic notch filter!!!