In Mission Planner, I’ve configured the battery monitor to Voltage Only, Other & Pixhawk. If I select AttoPilot180A the measured voltage drops down too far.
The only difference in my wiring is that I don’t pass thru the voltage from the AttoPilot180A to my power distribution board. I realize I can’t measure current with this config, but I should be able to monitor voltage.
In Mission Planner Initial Setup, I specify the measured voltage and for a while things look normal (although the voltage seems to jump around a bit) but then the measured voltage starts to change.
I’ve read that some of the diagrams for the Pixhawk have the current and voltage pins reversed, but I’m not sure at this point.
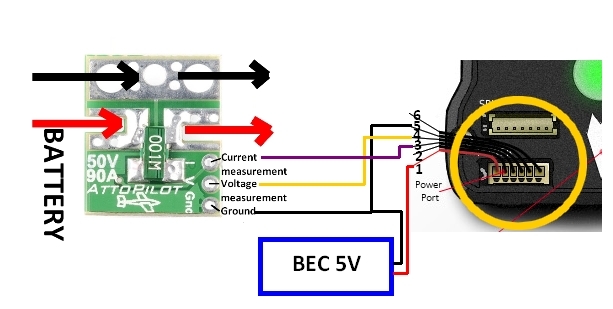
The voltage measurements work with a current going through shunt resistors. If your attopilot is not used to pass current, you will not measure anything. What is exactly your wiring scheme?
The voltage sensor is a simple voltage divider based on two resistors, and maybe a capacitor. you need to connect the battery power to the big terminals of the current sensor, but you do not need to have the load connected to the current sensor (no current needed to measure voltage)
Depending on the resistors (depending the desired voltage range it is expected to measure, or if the manufacturer used low quality +/5%, 10% tolerance, you may need to calibrate it’s reading using a voltmeter and calibrate the value using BATT_VOLT_MULT) - both APM Planner and Mission Planner have a GUI that helps you calibrate it in one step.
I rewired the Pixhawk to the AttoPilot 180A and now the voltage is accurate and consistent. I sure wish someone would build more “turn-key” parts for the Pixhawk. I feel like I’m building a “Heathkit” project. I’m switching from DJI for reliability reasons, but at least DJI makes it easy to assemble and program.