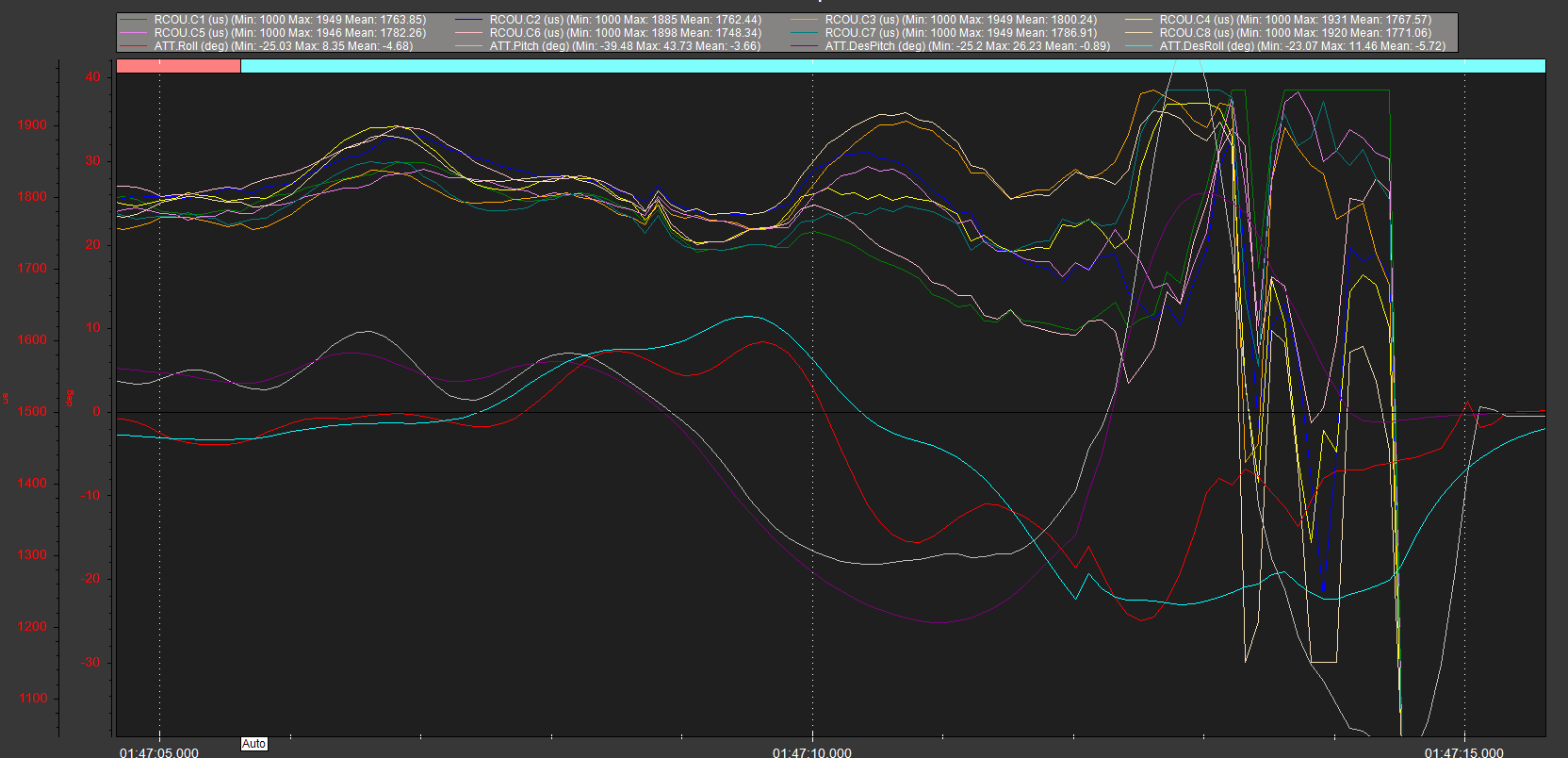
Because it not tuned right yet, and it seems underpowered, once pitch and roll deviated too far the motors werent able to produce the required thrust at the right times.
Motor 1 and 7 seemed the worst affected, and motor 8 going to minimum to try and compensate.
You might be able to tune it better, but this could also be a problem with the ESC/Motor combination. Or if the ESCs are right out on the arms near the motors you could need more capacitors on the power wires right at the ESCs.
Voltage drops accordingly. Current looks like it is reaching a peak/limit at other times during flight too so that might become a problem over time.
There’s no static or harmonic notch set up in that log. Set this:
INS_LOG_BAT_MASK,1
Also something very important, connect to MissionPlanner, press Alt A and set your correct battery failsafe levels via that dialog, and DEFINITELY set these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2