Thank you, sorry for the late reply.
Before seeing your answer, I tried lowering the IDLE RPM by adjusting MOT_PWM_MIN.
However, half success and half failure.
The IDLE RPM was lowered as desired, but it did not satisfy the reasons for wanting to adjust the IDLE RPM.
This is not the case when using FC such as DJI or JIYI in the same copter, but only when Ardupilot (pixhawk4) is used, there is vibration after arming before takeoff.
so I wanted to adjust the ILDE RPM, but I did not get the desired result even after adjusting enough. (Loiter Mode of a large quad/HEXA copter for agriculture with a 34-36 inch prop and a 20-30 kg payload)
If the motor RPMs are similar on the same copter platform, the level of vibrations generated should also be similar.
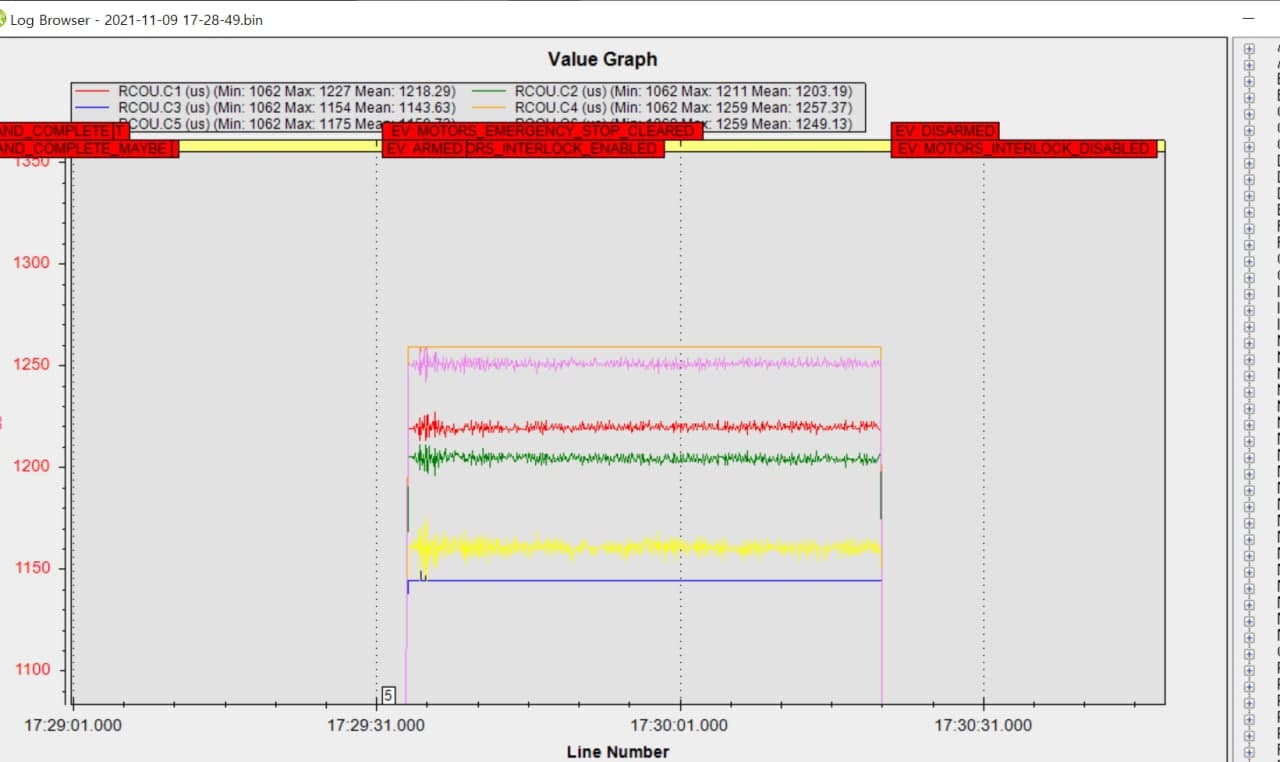
Ardupilot tries Attitude Control immediately after starting up and even in idle state before takeoff, so that each motor RPM changes and vibration is amplified.
In the case of DJI or SIYI, Attitude Control is not performed after arming, but self-control control starts the moment the throttle rises after takeoff. In the idle state after arming, the overall motor RPM of the copter is the same, showing a safe vibration level.
(The vibration of the copter before take-off causes an amplification of the anxious mind of the novice pilot. Of course, I think the Ardupilot is better after take-off.)
(I think that the timing of Attitude Control is set this way due to legacy such as Stabilized mode. And it is necessary to control the IDLE state optimized for each flight mode)
of course,
I’ll look further into Ardupilot to see if there’s a workaround I’ve missed. thank you.