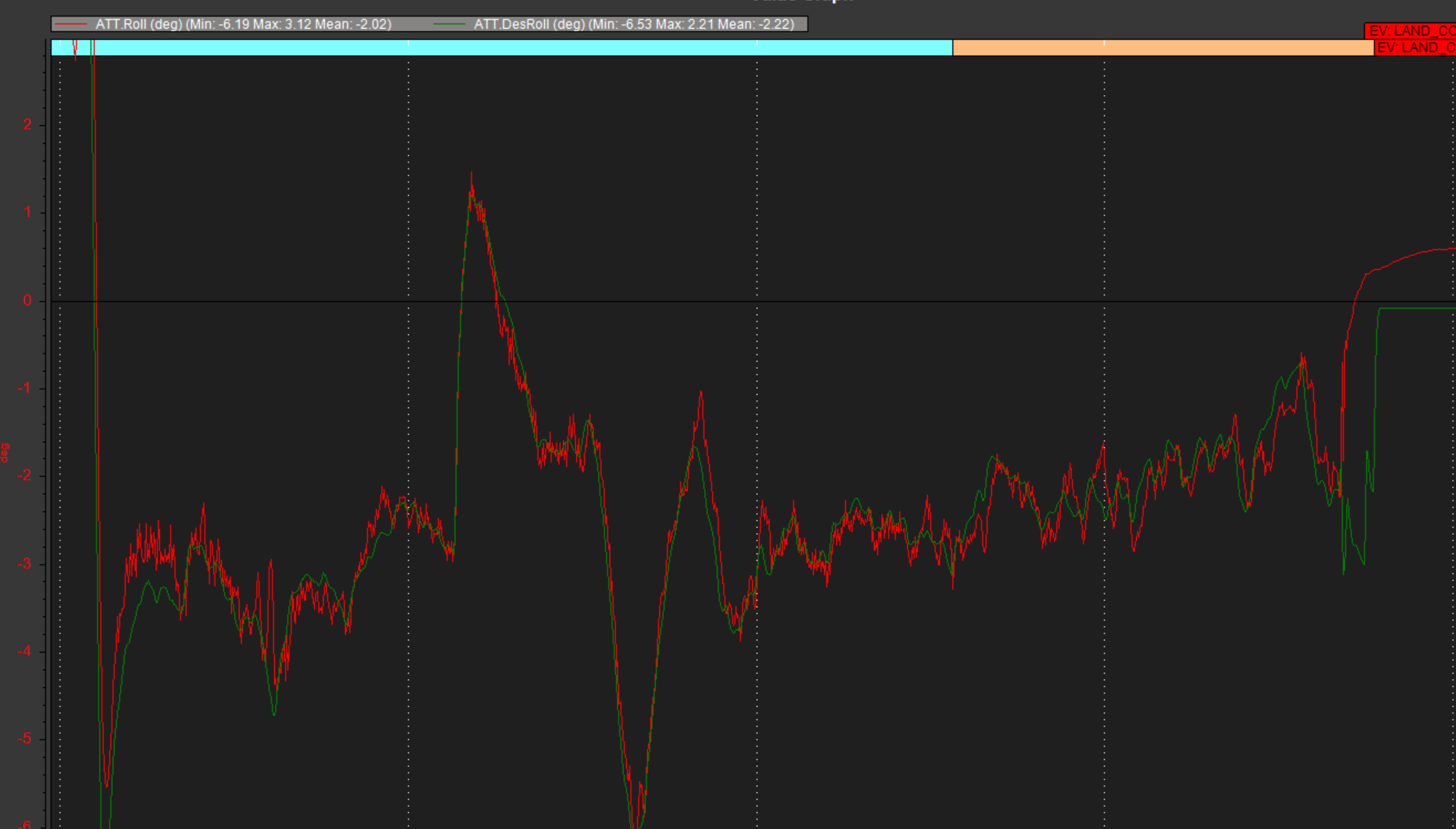
So far I think we have a pretty decent P terms in all the loop control: actual angles follows pretty closely target angles, action is quick, and there is no overshoot (am I right, no?). However, I would like to remove these tiny oscillation highlighted below.
First of all, what is the root cause of it? First thought it is maybe cause by gyro noise, but we have already settled a Dynamic Notch filter, and most of the noise caused by the motors is already removed. Second thought it is maybe caused by an improper D Term, however as I said, overshoot is pretty much already controlled…
So guys, what would you advise me to try? Modifying filters? Increasing or Reducing D Terms? I am looking forward to hear your advises.
Thanks,
JM
PS: Is there any place in the wiki doc where it is explained how to diagnose tune issues from the logs?
Looking at the 0kg log…
Pitch and Roll attitude control is quite reasonable, but yaw is terrible
Motor3 output is generally higher than the rest and sometimes going near maximum. Motor2 is usually lower than the rest, indicating a weight imbalance. This might be OK if your payload fixes that, but overall you might be a bit underpowered.
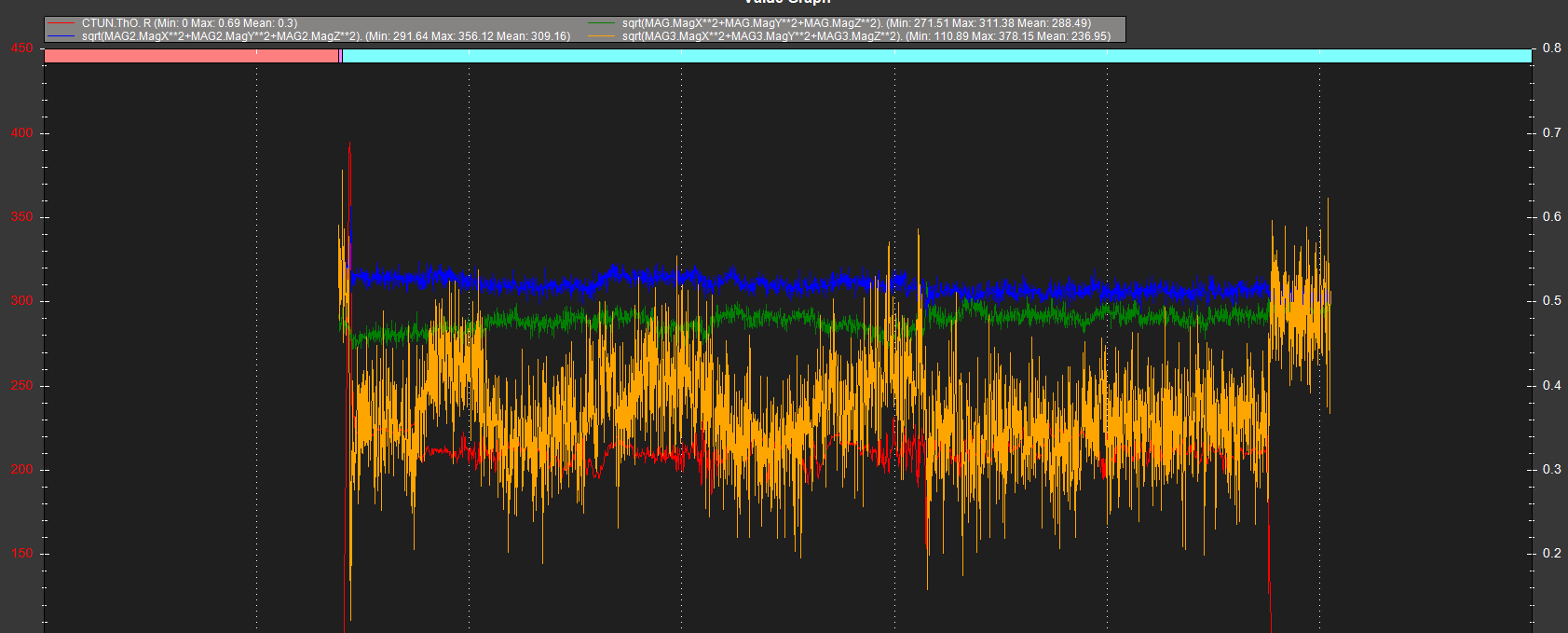
Compass ordering is wrong I think. Compass 1 and 2 are working OK and Compass 3 is affected by current draw/throttle. Check which compasses really are external and which should be enabled. This might help the yaw issues quite a bit.
INS_ACCEL_FILTER,10 is quite low. That may be OK but go as high as you can without causing problems. Try 15 or 18.
In the 4kg log, Yaw is better. The payload must settle things down a bit.
The motor outputs are even closer to maximum, and motor 2 is even lower compared to the rest.
I suspect you have T-Motor Flame ESCs, and I think they lack the resolution to control the attitude much better than what you have it now. Running Autotune might not be a good idea.
You might be able to improve the PIDs slightly with careful transmitter-based tuning, but limit the range of any changes, since I think you have things pretty close now. https://ardupilot.org/copter/docs/common-transmitter-tuning.html#common-transmitter-tuning
You might be able to go a little higher on these Yaw values, but test carefully.
ATC_RAT_YAW_I,0.02
ATC_RAT_YAW_P,0.25