I’m using a HereLink, and I’m only implementing the control wheel for manual control of pitch. Works great.
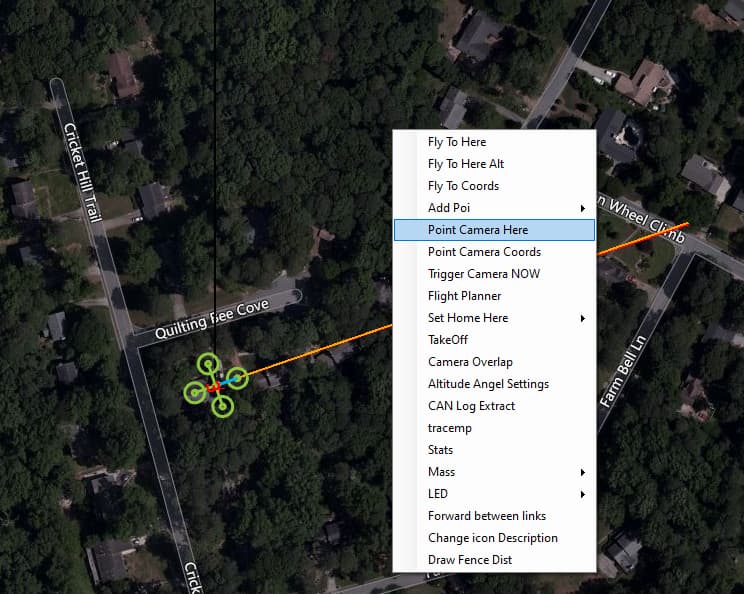
Full autopilot control of the gimbal seems to work well. I’ve tested it on my workbench by using the “point camera here” function in Mission Planner. The autopilot correctly directs to gimbal to point to that point in space. (3D - latitude, longitude and altitude)
The problem is that after doing a “point camera here” command, the control wheel no longer functions. In fact, moving the drone around the workbench, the gimbal continues to pitch and roll to the “point camera here” point in space. I don’t know how to make it stop pointing.
I’m guessing that to regain manual control of the pitch, roll and yaw - the “point camera here” function must be discontinued somehow. I don’t know how to do this.
In my previous work with gimbals, I’ve installed and configured both AlexMos a Storm32 gimbals. In both case I used MavLink as the option for the SERIAL(n)_PROTOCOL.
Storm32 gimbals supported two communication protocols, MavLink and it’s proprietary Serial protocol.
I’m curious that the Storm32 Serial protocol is specified for the SIYI A8 - per the wiki. I’m wondering now if perhaps SIYI is using the Storm32 electronics and firmware - as they are open source.
By copy to @rmackay9 - this may be a bug in the current status of the gimbal software development.
I’m using copter 4.3.
Thank you.
Note - I decided to try changing to the protocol to MavLink - and the gimbal was unresponsive. So it appears the A8 is truly following the Stom32 Serial protocol.