In addition, I also want to obtain the desired position vector value and the desired value of the vehicle speed.
How should I get it from the log, or record some values in the ardupiot code to get?
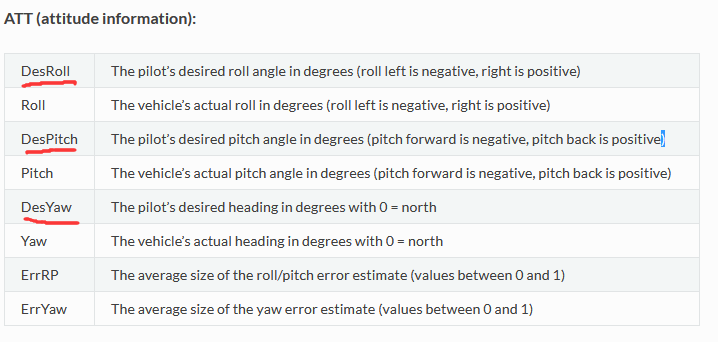
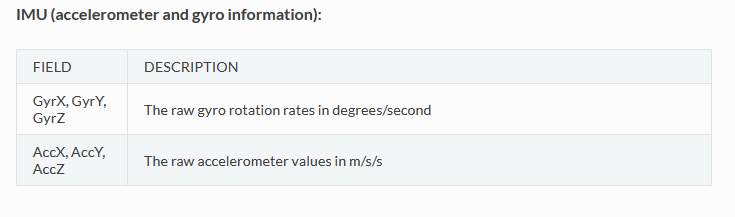
For example, I use (mavlogdump.py --format csv --types IMU LOGPATH.bin> LOGCSV.csv ) to get the following information.
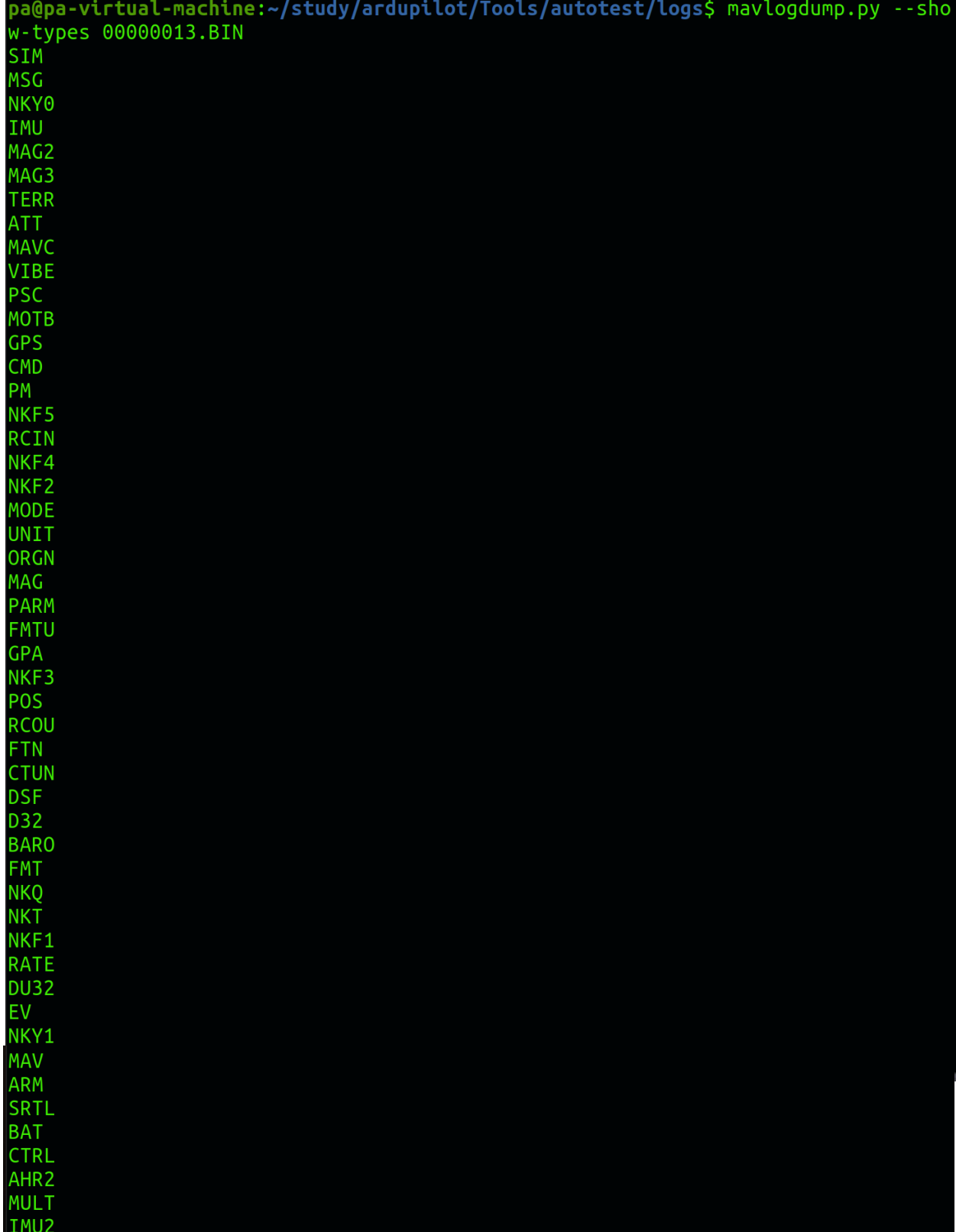
After I get the .bin log, I will use mavlogdump.py to convert the log into a csv file. Another problem is that the log types that mavlogdump.py can convert are as follows.