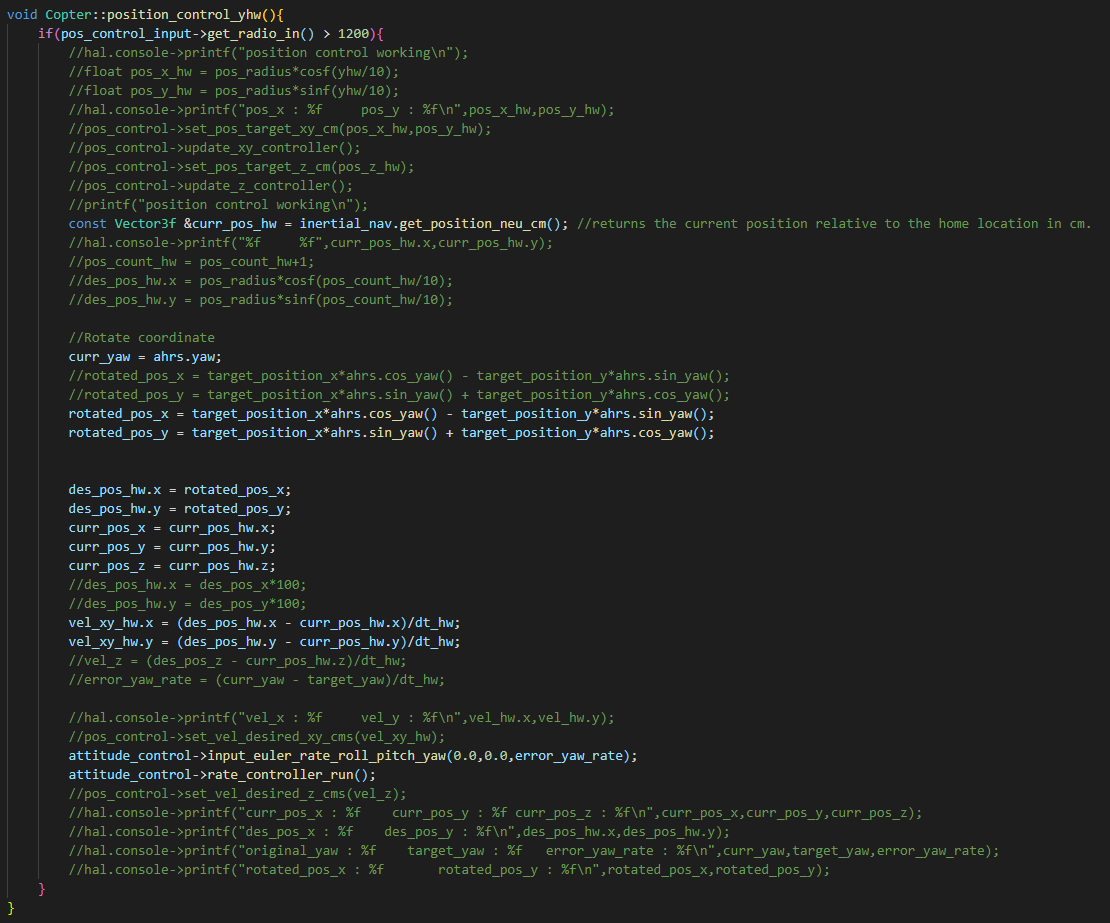
Hello everyone! I want yaw velocity control. I used function “input_euler_rate_roll_pitch_yaw()” at “AC_AttitudeControl.cpp”. It uploaded successfully, but it didn’t work. How can I control copter’s yaw? Here is my custom function