Hi people.
Assume a plane is flying in a straight line, level flight at a constant power setting. Assume that the GPS unit has a good fix on as many satellites as it needs. How precise and accurate is the groundspeed and heading in Arduplane at any point in time ?
Would the error be random or have a certain bias or distribution ?
How often are ground speed and heading updated ?
Thanks
Heading and ground speed based on GPS are very accurate under the conditions you describe. Uncorrected positional GPS shift is slow, so a moving speed or bearing is very accurate. Faster is more accurate. That said Ardupilot heading is a function of the compass or dual GPS inverse. A moving GPS compass is not used as far as I know. It would be excellent for plane or anything that does not stop or hover.
(if gs<1ms then use compass)
5-10hz normally depends on your GPS.
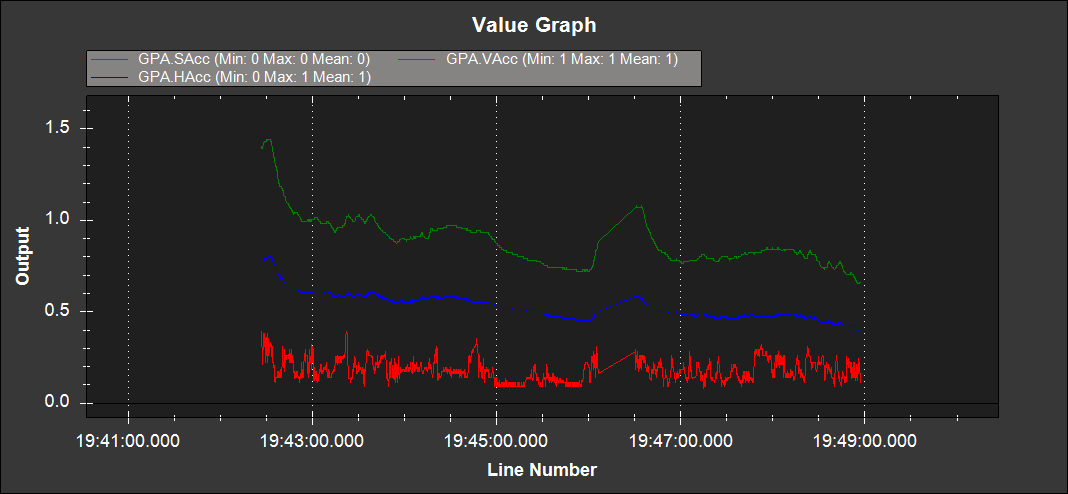
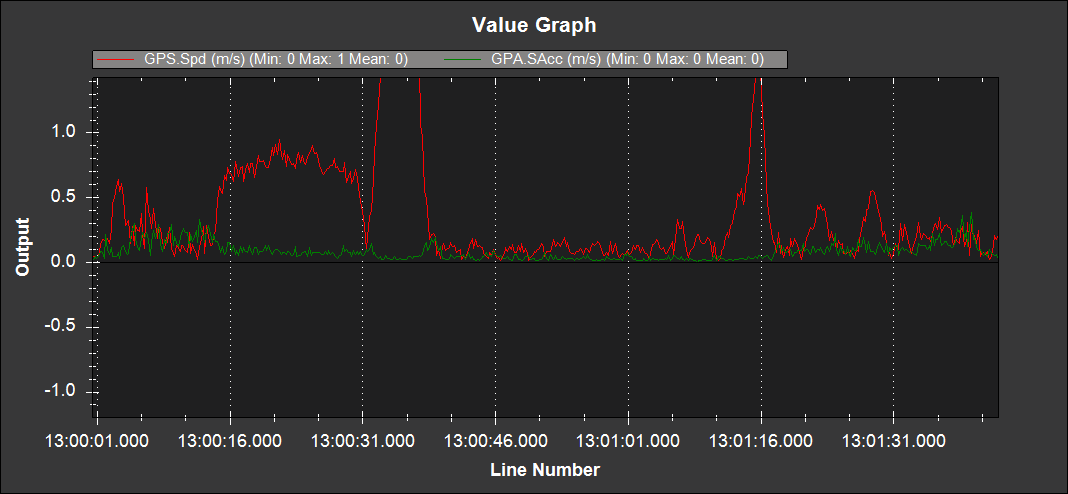
The red line is the speed accuracy is without RTK.
I saw that graph.
Are units in m/sec ?
Was the GPS/IMU stationary or moving ?
If it was moving, how do we know that is the error ? What was the “correct” reference from which the error was calculated ?
If it wasn’t moving, how do we know what the positional error is when moving ?
What is the error after the RTK is applied ?
You can see the big RTK improvement for position, not so much in speed accuracy. The speed of your craft is what helps the speed accuracy the most.
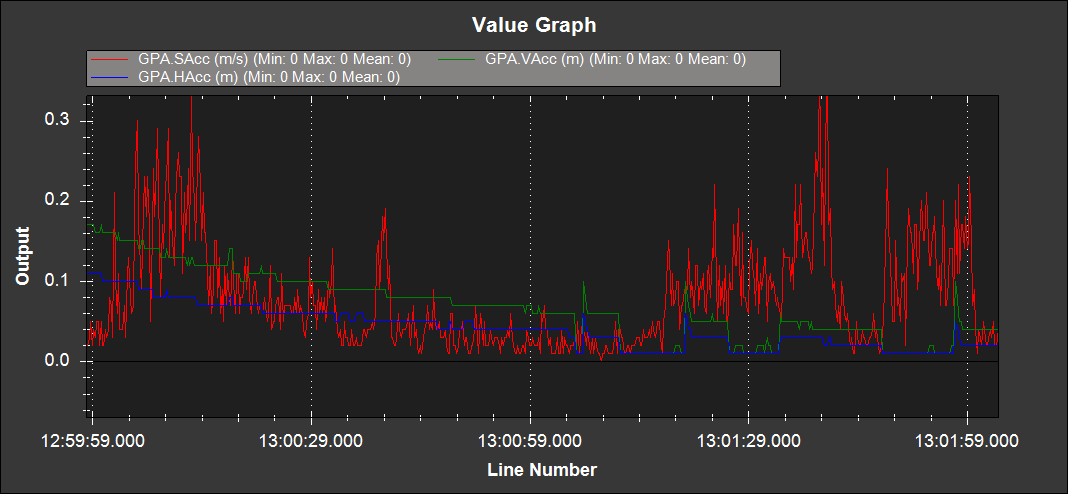
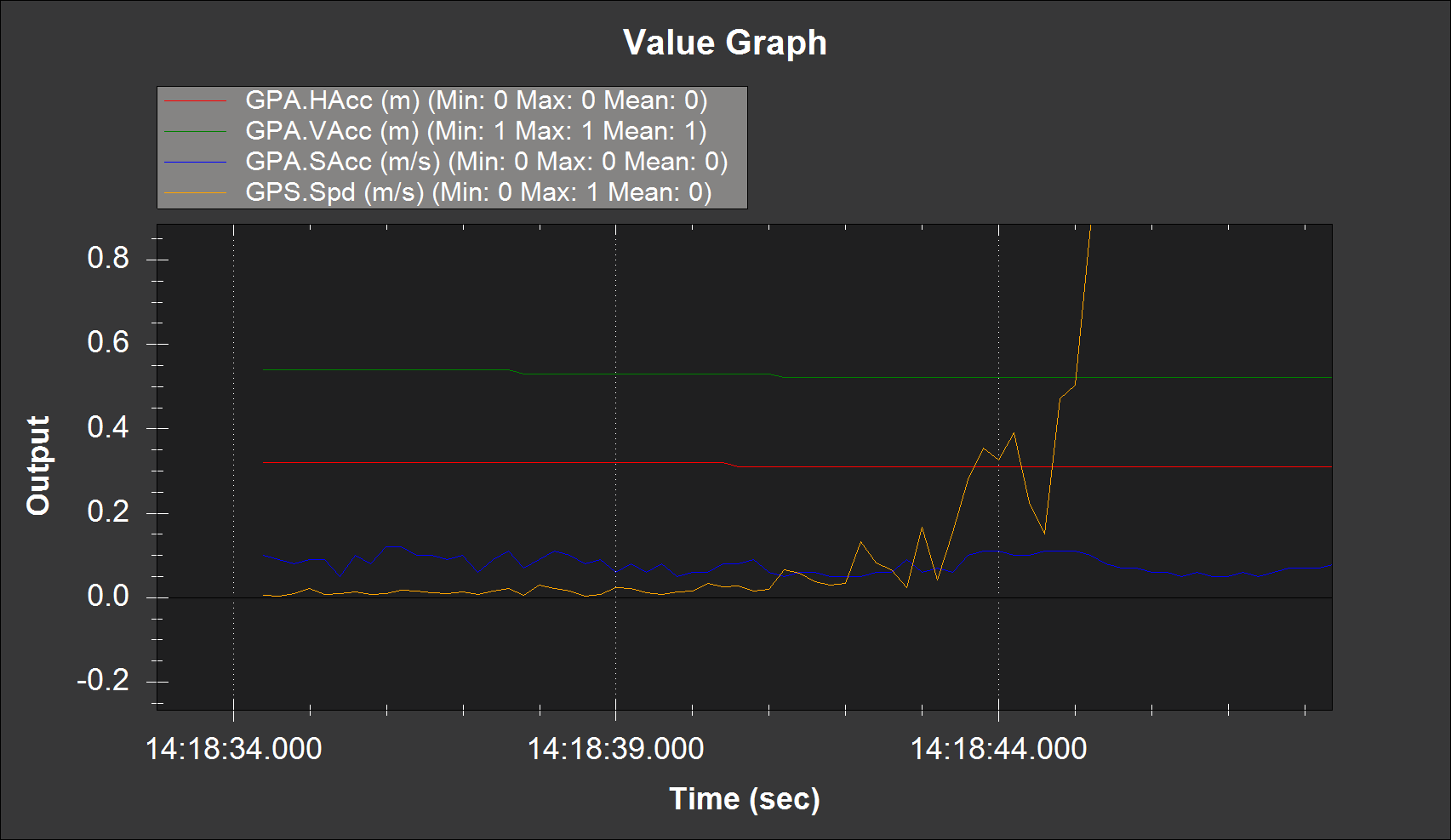
Here are results from a F9P (multi band GNSS) without RTK applied.
Speed accuracy is under .2 meters per second.