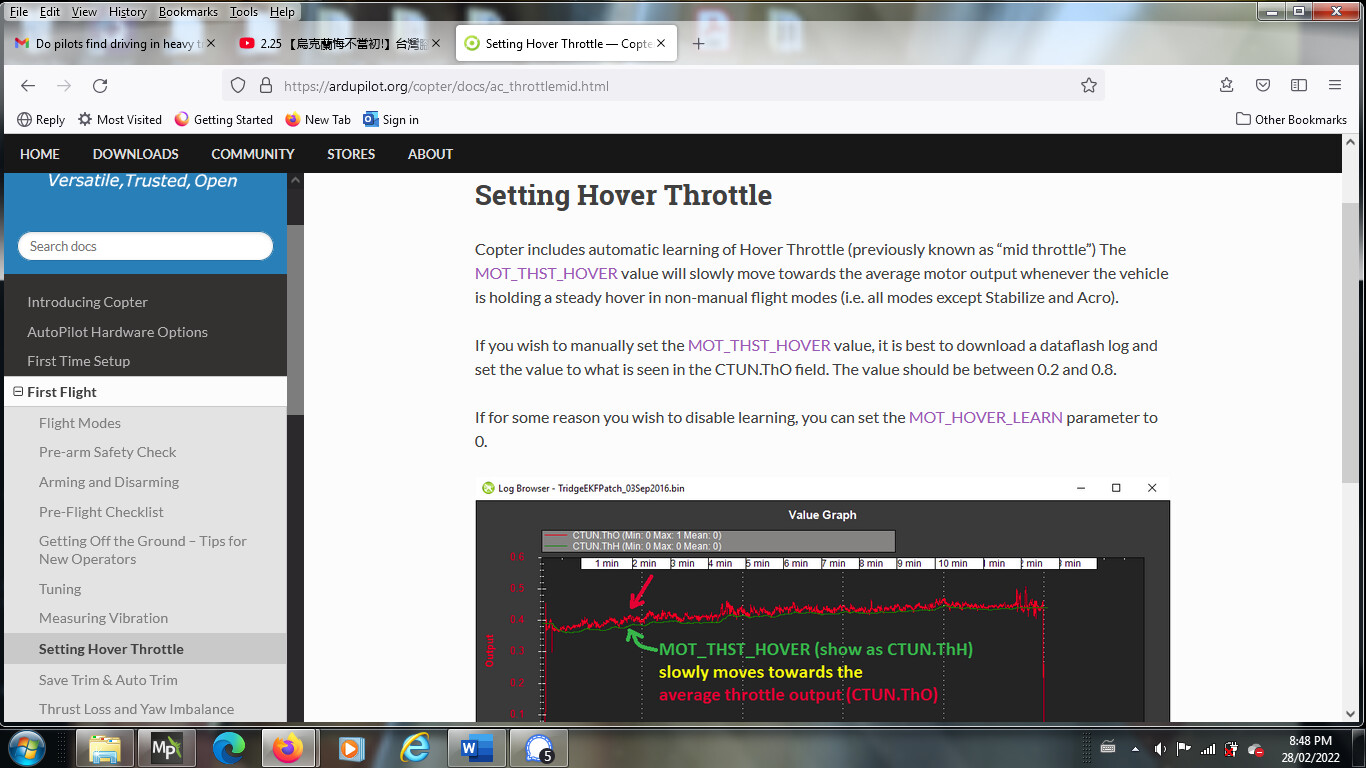
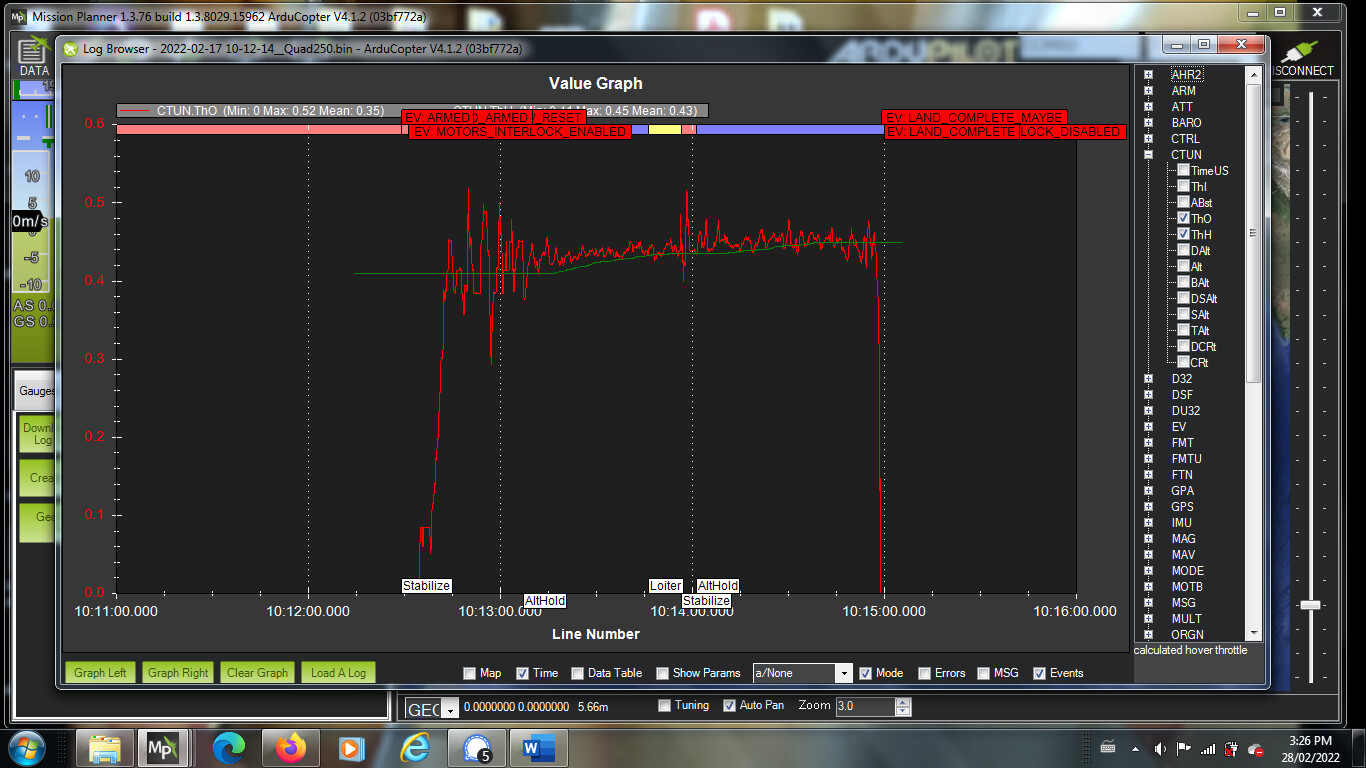
I am wondering why the ThH in the attached ThO vs ThH curve (from Wiki) is a curve (green), but the ThH curve attached (green) in my 250 size quad is made up of 2 to 3 segments of more or less straight lines. The MOT_THST_HOVER value in my quad is achived by constant hovering with MOT_HOVER_LEARN set to 2 (learn and save).
DF log attached.
Does anyone has any clue ?
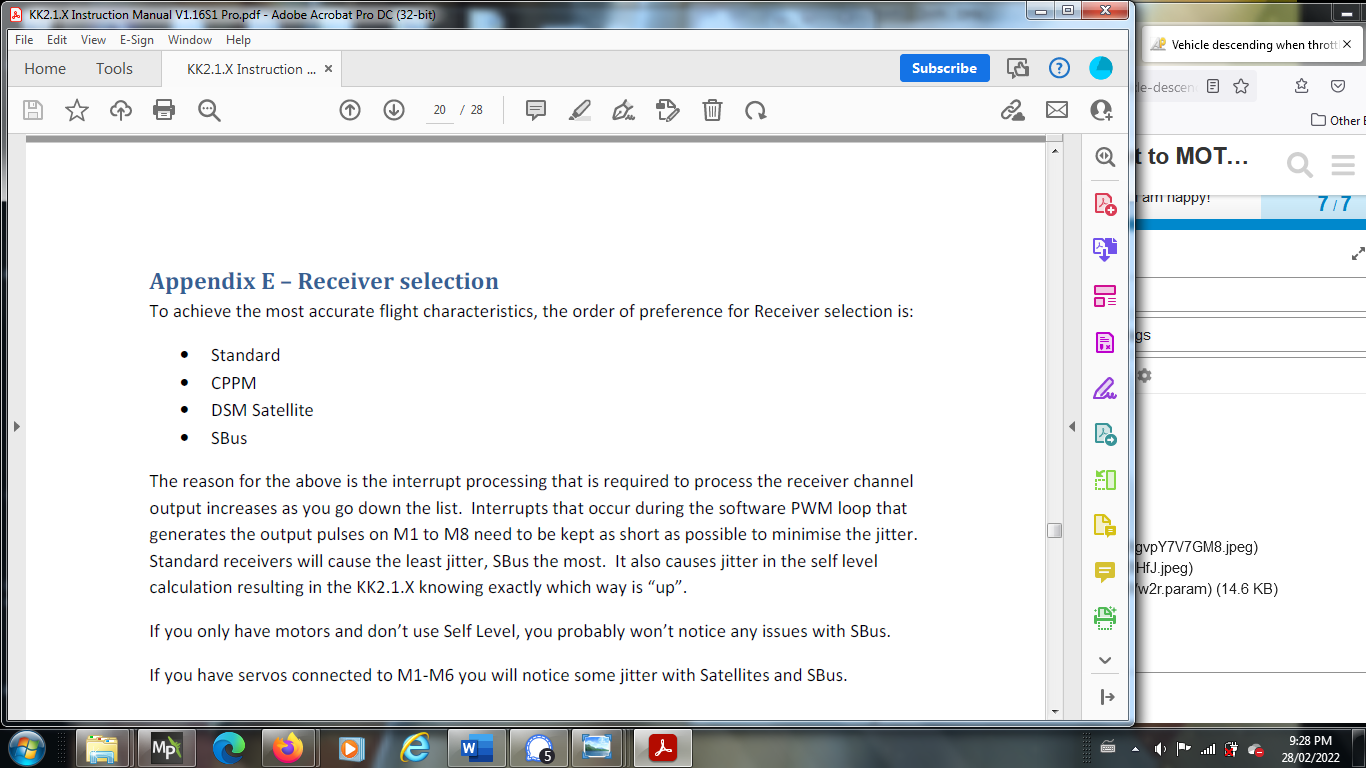
My estimate may be my use of CPPM in CM703 (instead of PWM)…pls see attached the extract from KK2 manual about the choice of Rx. Do you think using standard PWM will yield a ThH curve following more closely to ThO ? Appreciate any input.
Arducopter V 4.1.2,
BL Heli 12A ESC,
Emax MT2204 2300kv,
FC : Revolution
Rx : Redcon CM703 using PPM output.
Tx : Jumper T16
Param.param (14.6 KB)
Thanks
Frankie