Hi,
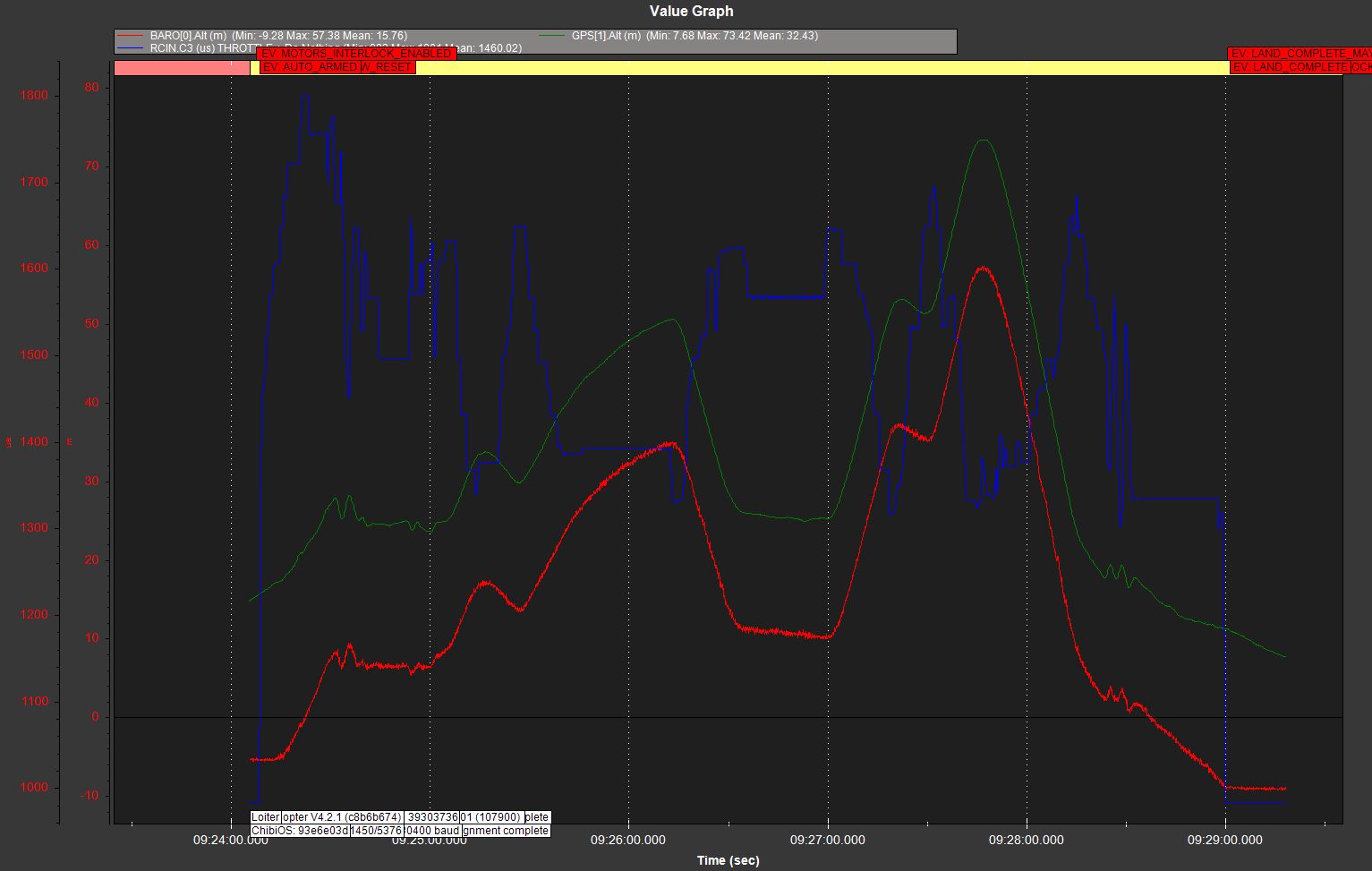
I’m testing a hexacopter and experienced some strange behaviors of the drone in loiter mode. Sometimes, the drone altitude did not follow the throttle command. As you can see in the photo, at first, the drone hover normally when I put the throttle stick at 1500. But suddenly, it raised the altitude even when I lowered the throttle stick less than 1400, then decrease the altitude when the throttle value was higher than 1600.
Thank you so much for your reply. Actually,
I have done the setting the aircraft up for tuning (calculate the MOT_THST_EXPO, PID controller Initial setup…), completed many test flights and tuning the ATC_RAT_X, completed the AltHold test and Loiter tests. The drone is able to do a completed autonomous flight including temporary landing and take-off again. I also did some endurance tests (autonomous flight in 10 minutes in a 2km mission) without having any problem.
The throttle command - loiter mode behavior only happened in some tests, not everytime.
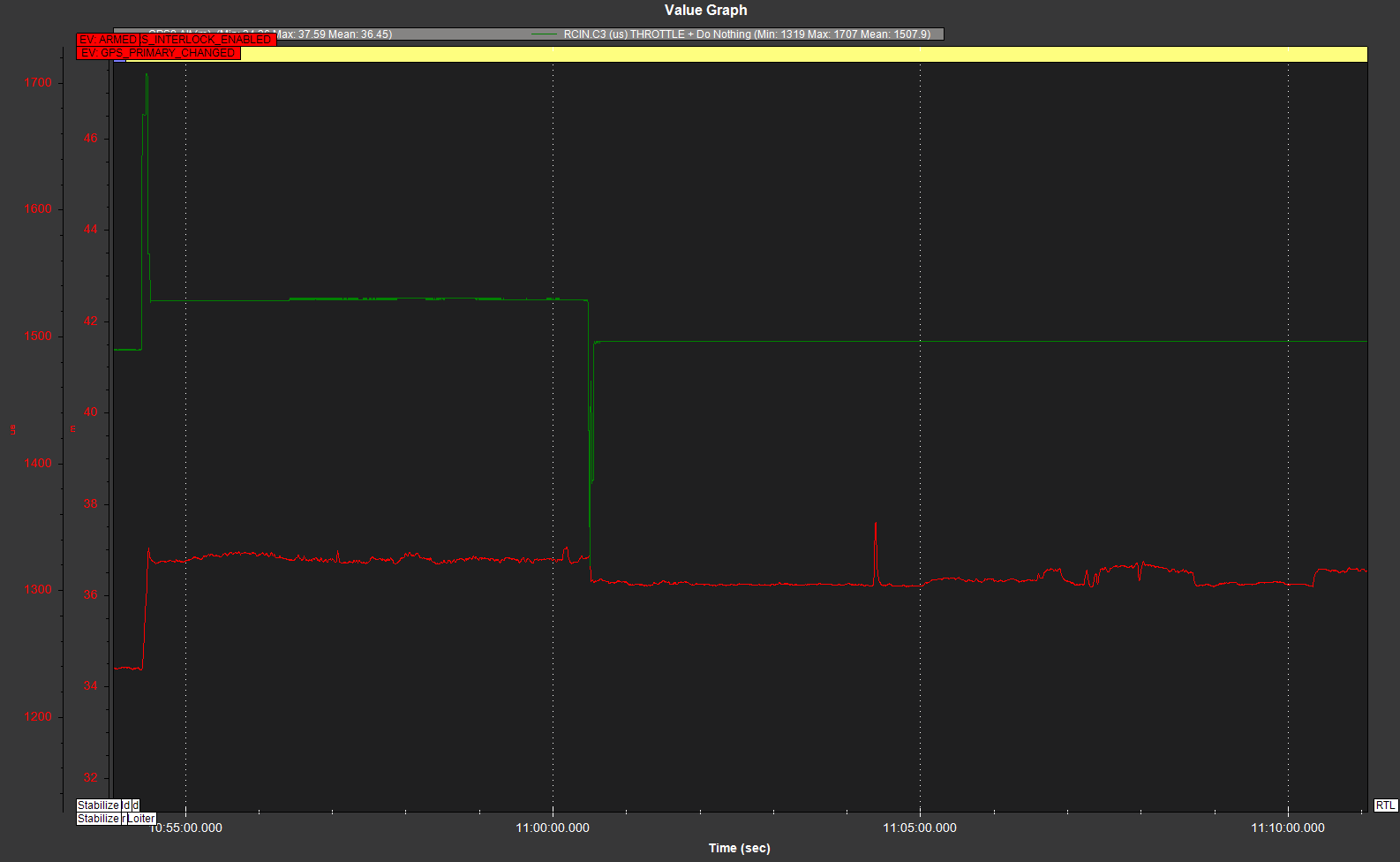
As you can see in the following graph, the drone did the position hold normally for 15 minutes. The altitude data came from RTK GNSS. Sometime the altitude changed because I moved the drone in X-Y direction to test the terrain following. Otherwise, the drone would keep its altitude quite well.
My suggestion is to spend more time on the tuning. In the log you posted the notch filter is not set, and many of the basic tuning values are still set to defaults.
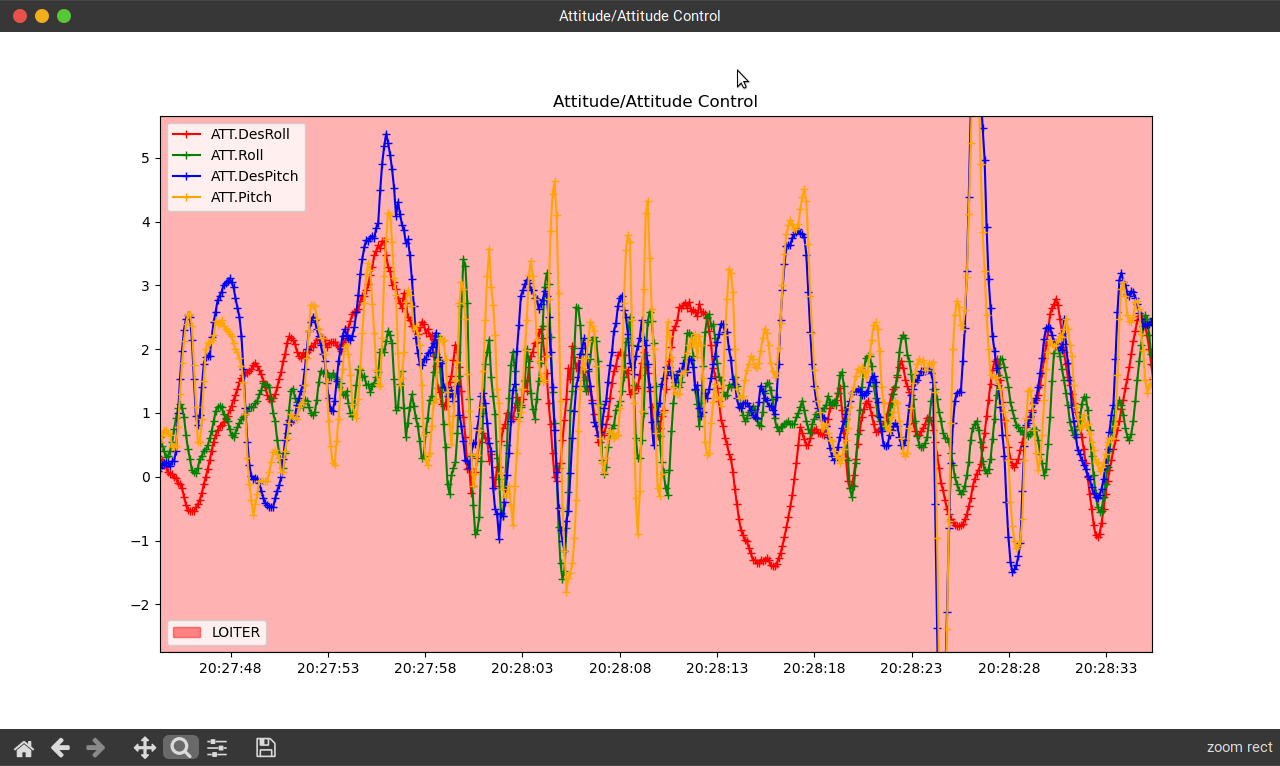
The graph below shows the pitch and roll performance is very poor. This is tied to the basic tuning.
The drone may appear to fly well but the logs are telling a different story. In the right conditions it may be able to do many basic tasks on defaults but when the conditions change the problems will show up.
Your defenition of flying correctly is possibly very different from ours.
Our definition has a lot more performance and stability margins because it is properly tunned following the instructions.
Not doing these things gives you a copter that barely manages to fly. And it is amazing the number of persons that think that such a system is “flying fine”
Sorry for the rant, but a lot of people have this misconception.