Holybro Durandal Electro-Magnetic-Interference (EMI) measurements (0-1 GHz, close-ups of 433/868/915 MHz)
In order to get the most out of long range radio system (Dragon Link in my case), I was in a search for components that emit as little RF noise as possible. I think, I finally found a flight controller that in this respect is really very well performing - the Holybro Durandal, and would like to present to you my findings.
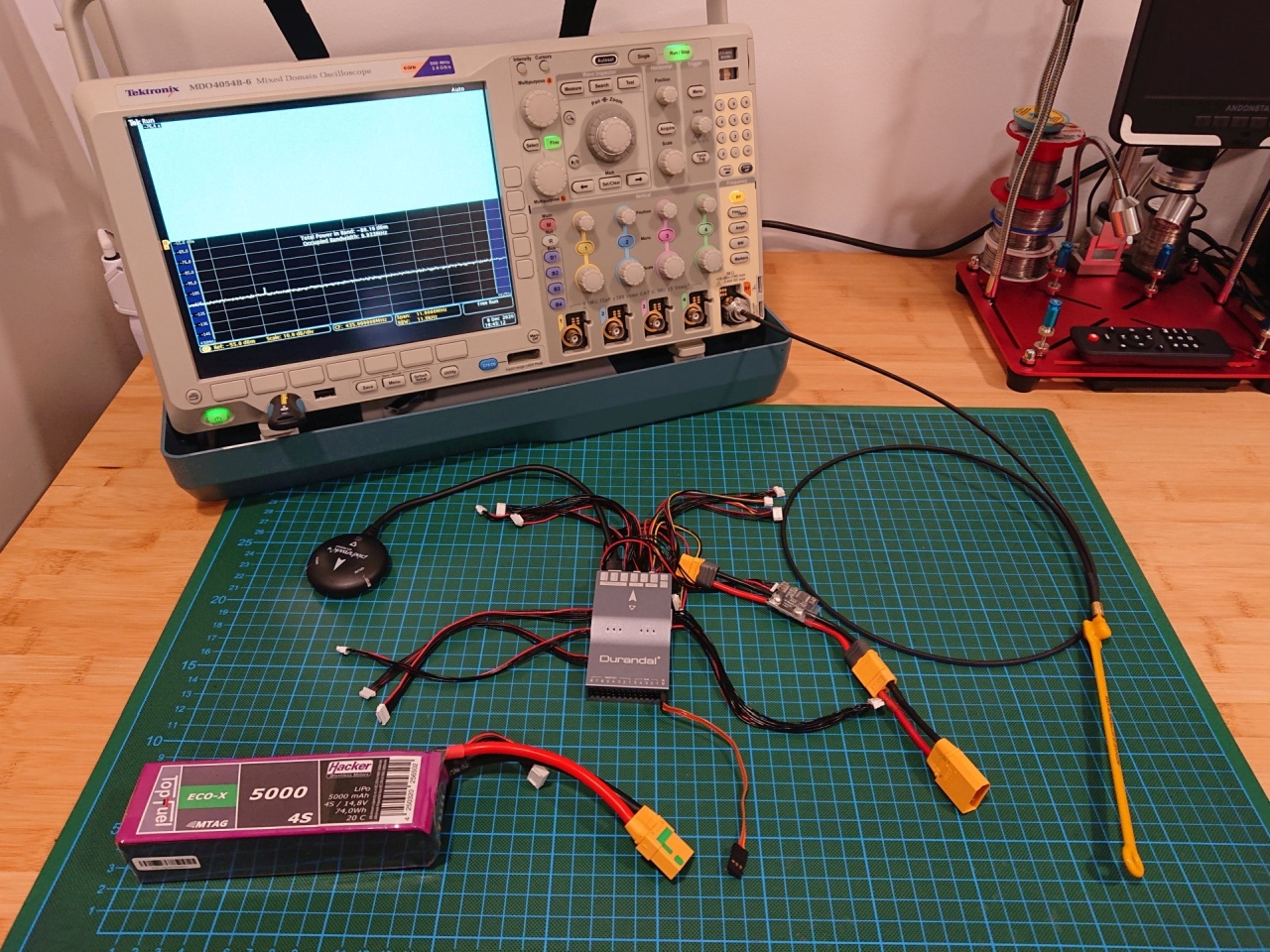
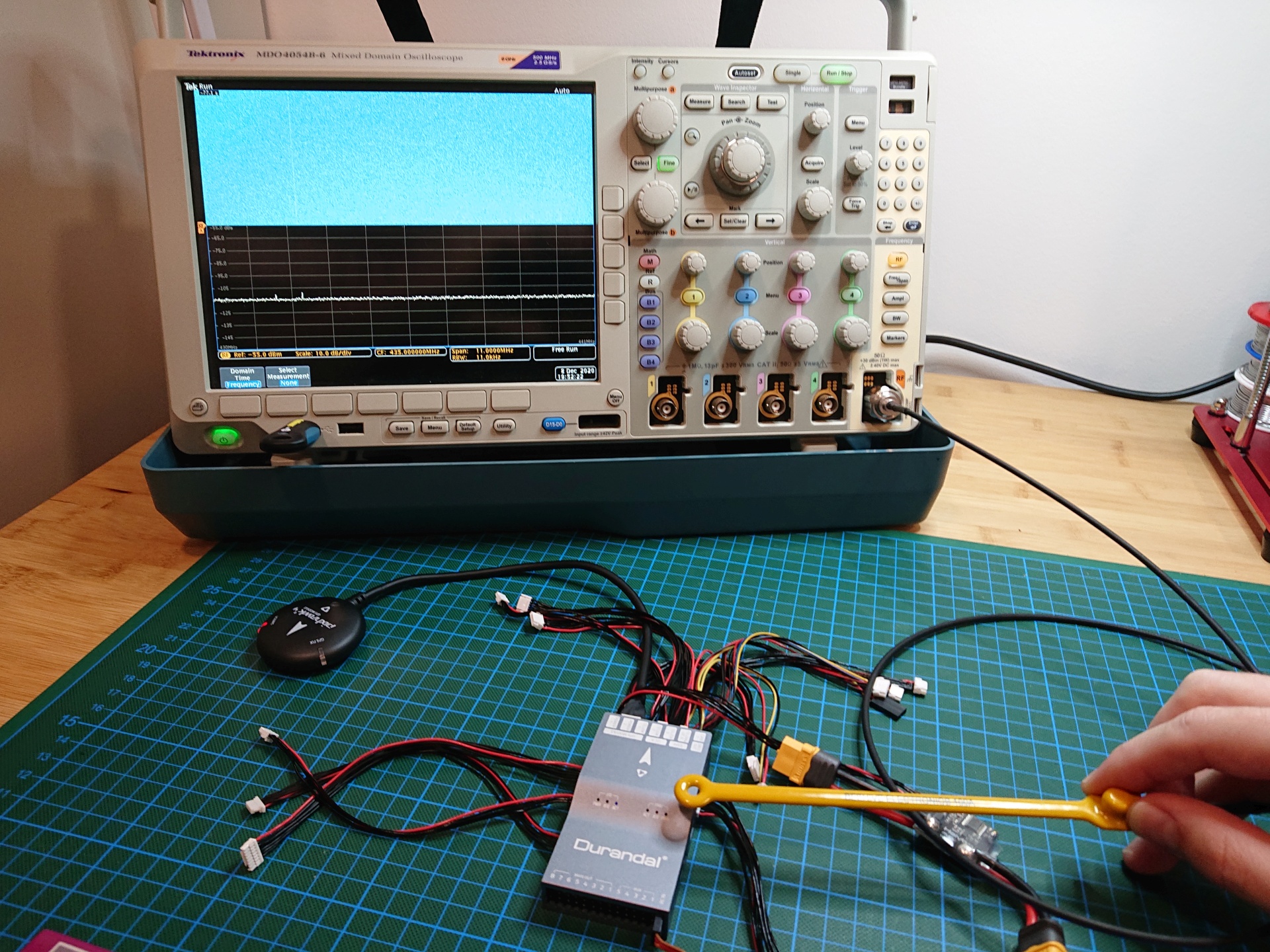
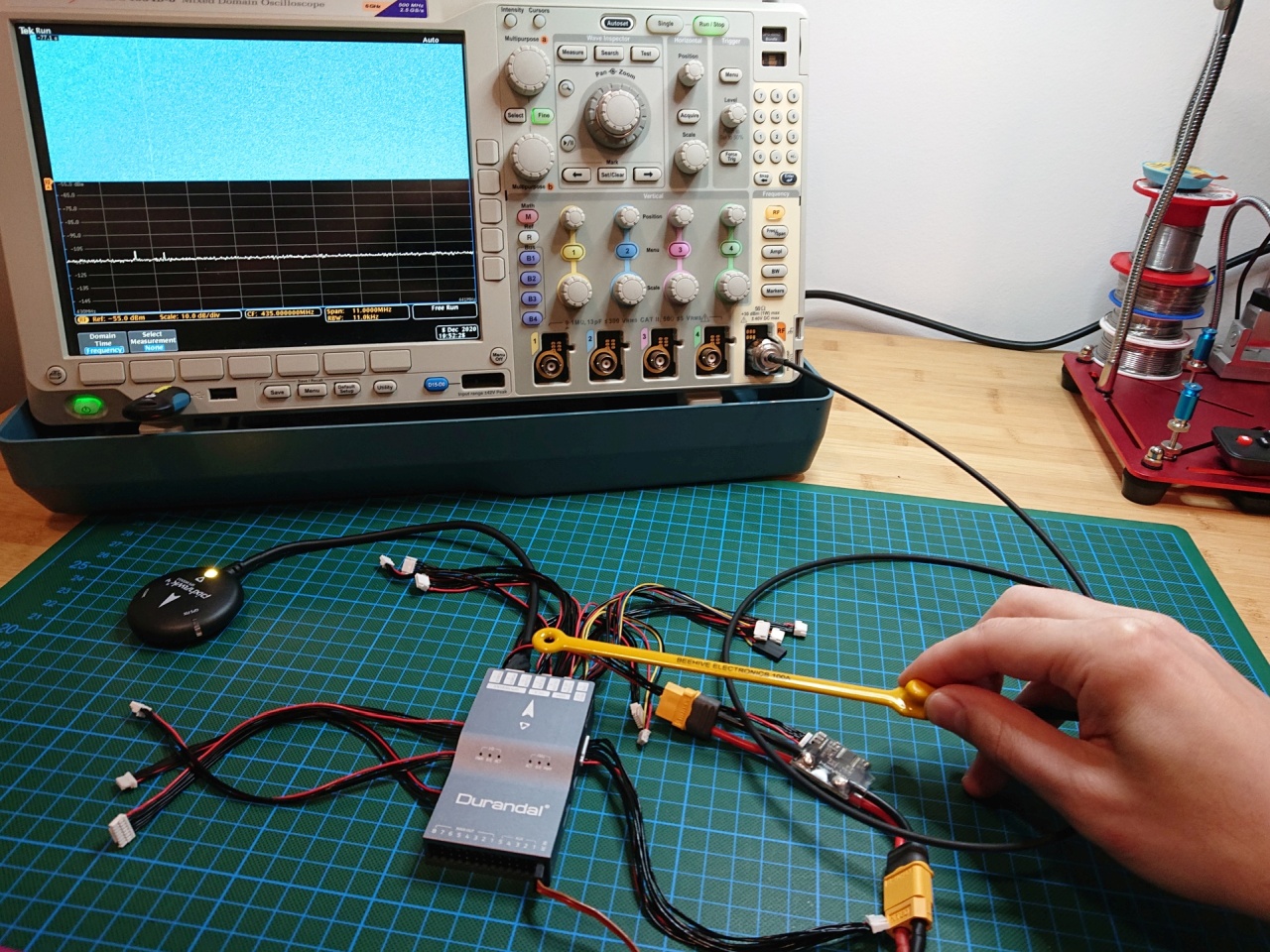
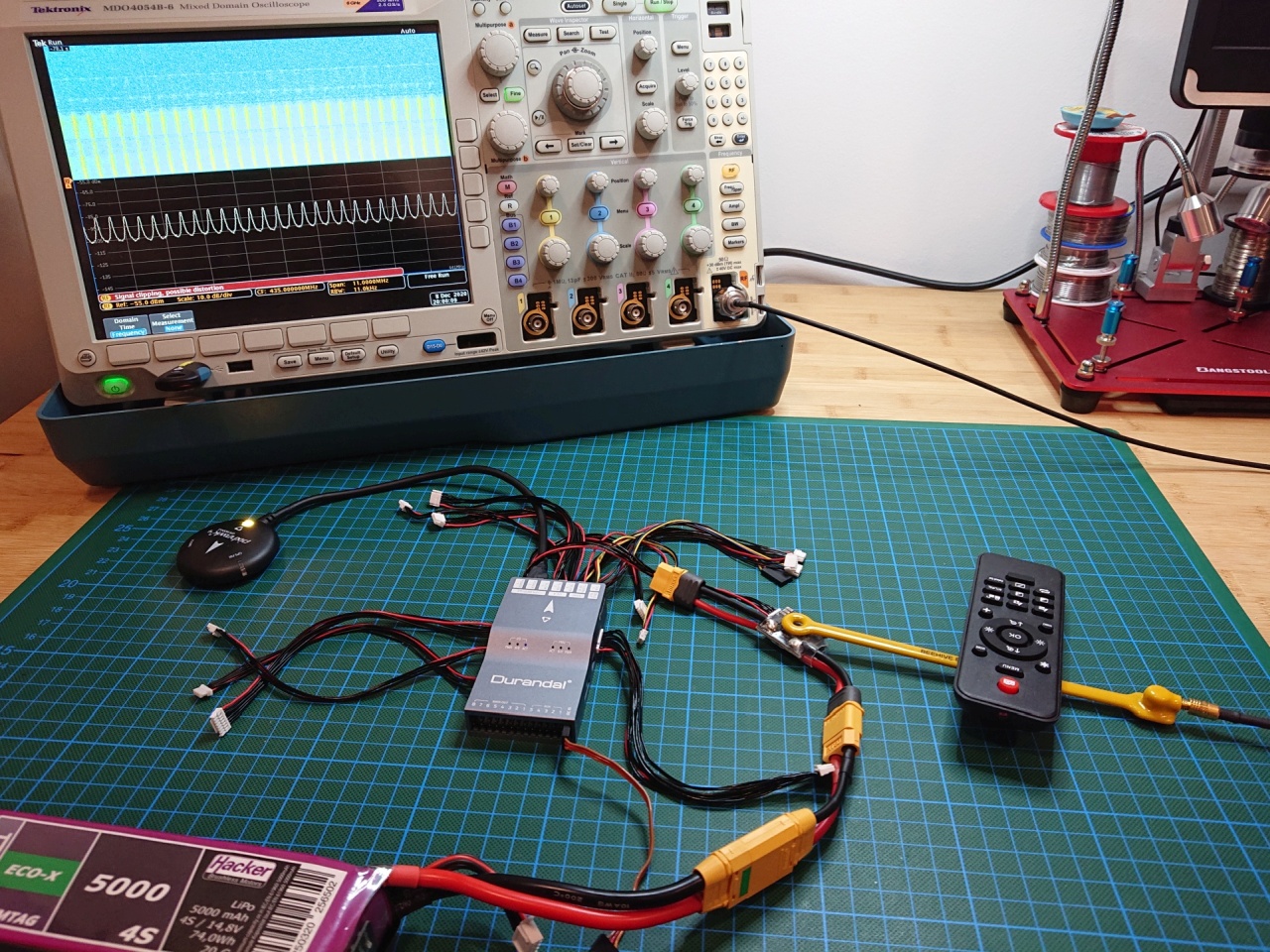
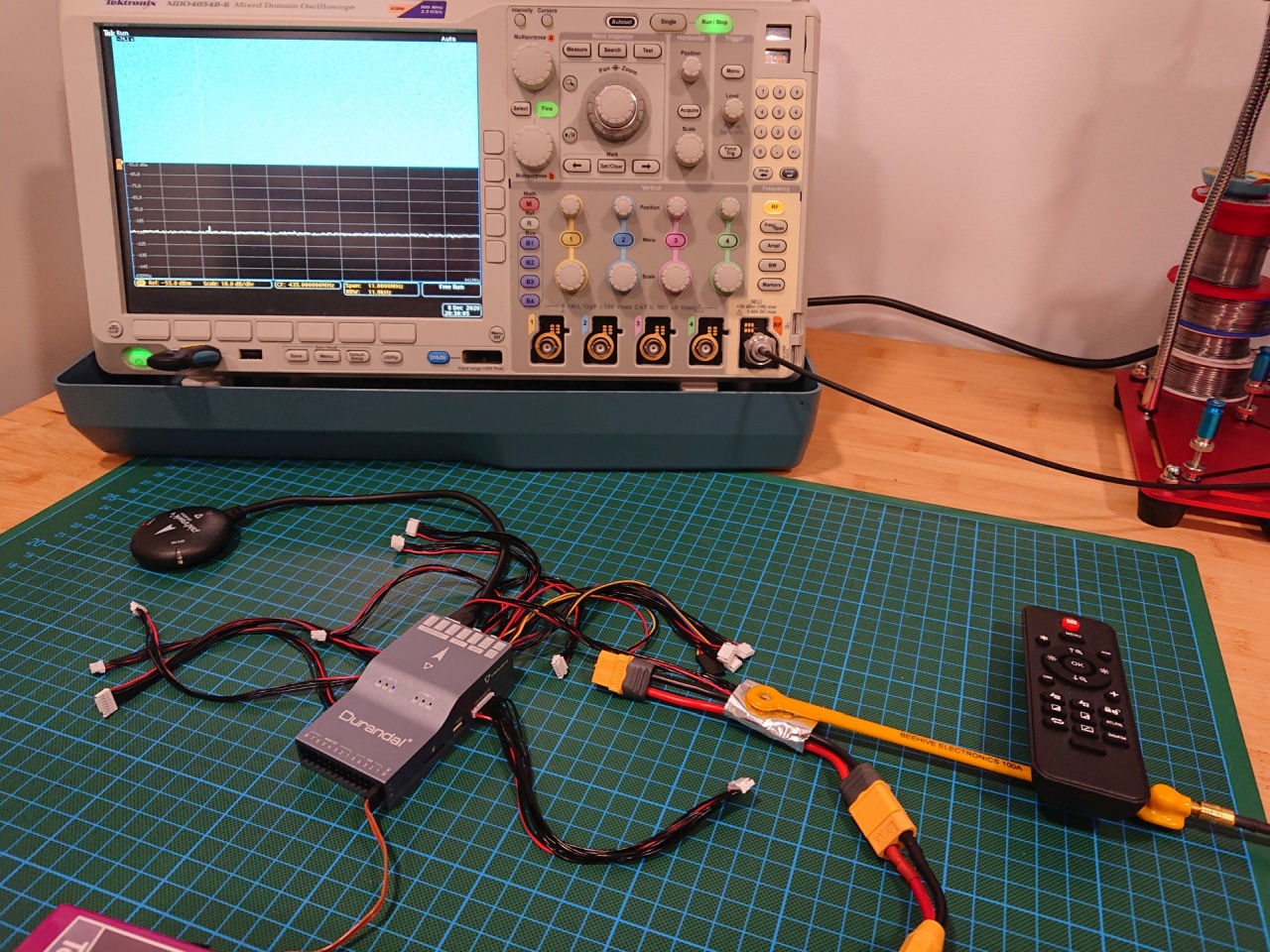
For the measurements I used Tektronix MDO4054B-6, a 6 GHz oscilloscope/spectrum-analyzer, together with the Beehive Electronics 101A EMC probe set. I mostly ended up using the 100A magnetic field probe for my tests as this seemed to be most sensitive in the area of interest.
Here is a picture of the setup:
My interest was only in the frequency bands of the DragonLink LRS system, thus 433 MHz, 868 MHz and 915 MHz. I first did a general frequency sweep from 0 to 1 GHz, then concentrated in smaller windows around the three bands mentioned. When the span is smaller, the measurement is more sensitive, which is why the big sweep from 0 to 1 GHz is not revealing as much detail.
I present you the scope outputs (screenshots), by first showing the ambient measurements, as a baseline of RF-noise in my area (as I carried out the measurements in my home-office workshop that is unfortunately not a nice shielded room). The signal present in the ambient needs to be imaginarily subtracted from the remaining measurements in the respective measurement band.
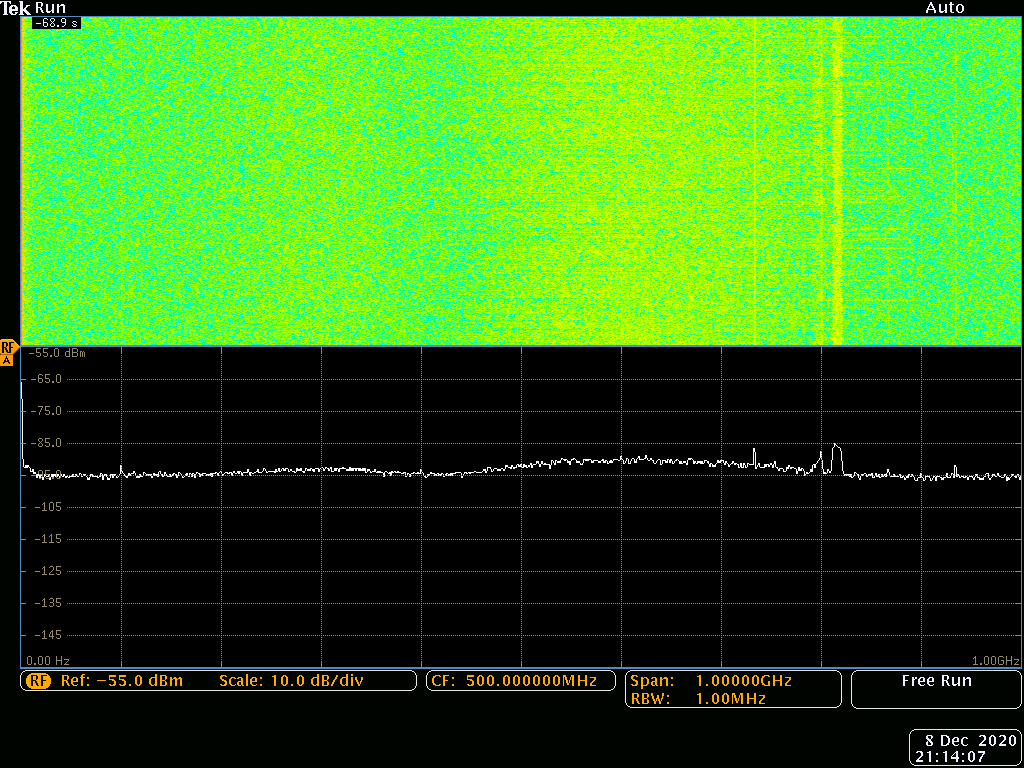
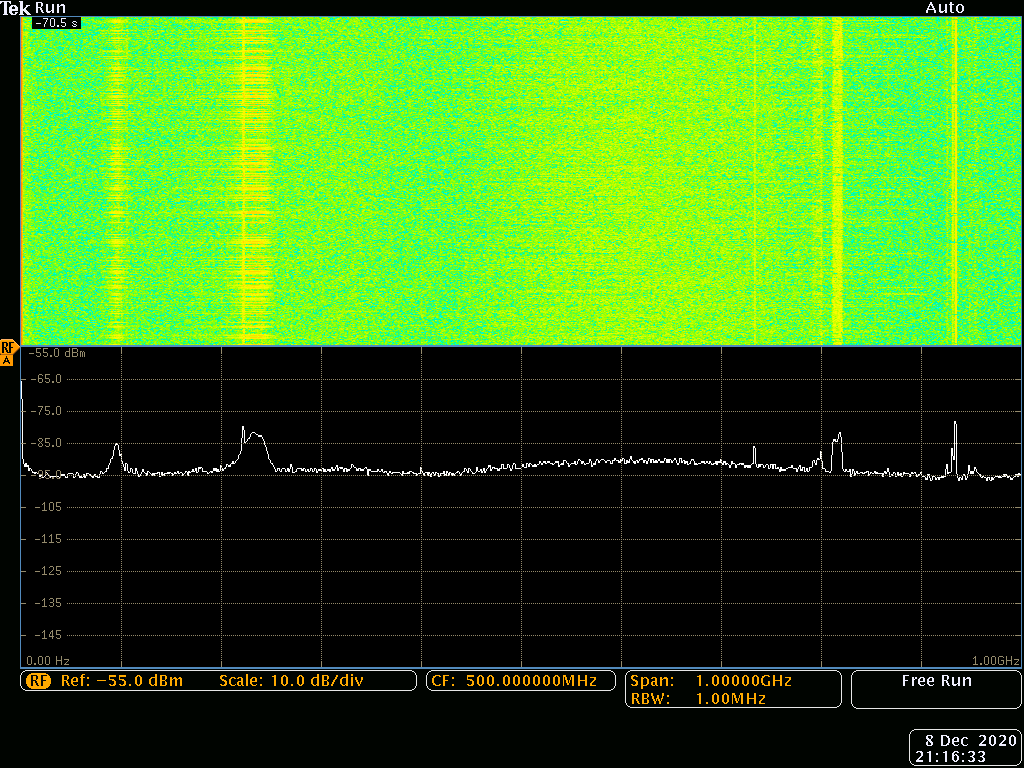
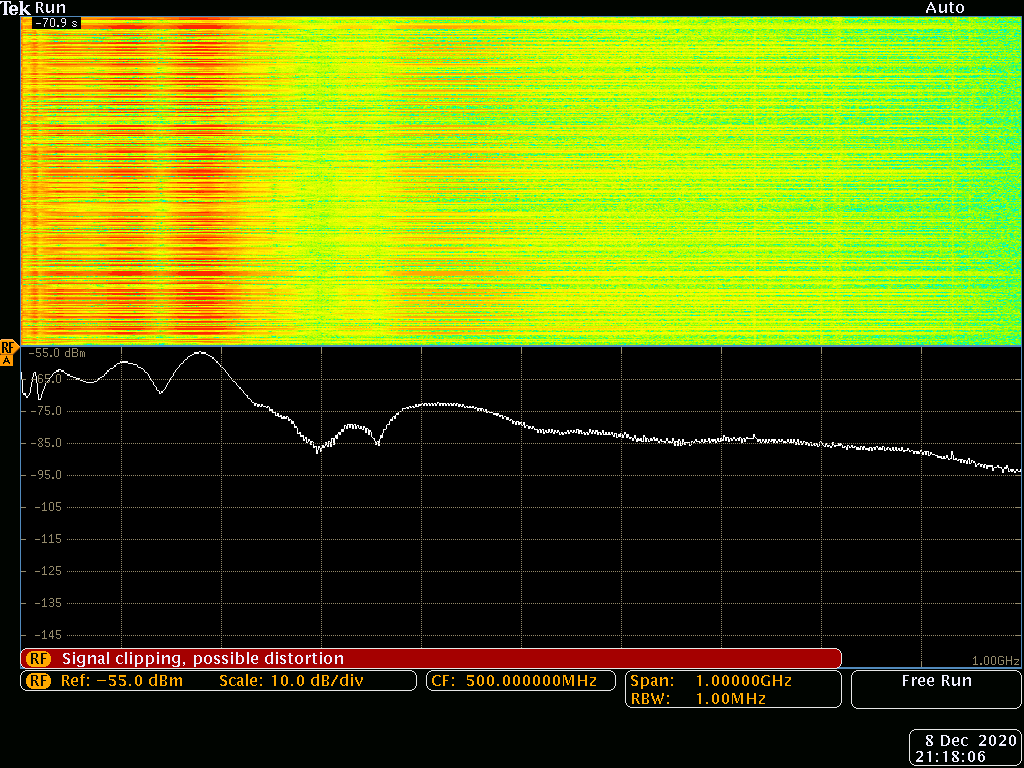
First the ambient across 0 to 1 GHz:
Here are some tips for viewing the attached Tektronix MDO4054B-6 screenshots:
- The horizontal axis shows frequency band measured. The left border of the scope screen is DC (=0 Hz), whereas the right side ends with 1 GHz. Each vertical thin line is a +100 MHz step.
- The lower half of the image shows the spectrum. The higher the energy in that frequency emitted/measured, the higher the signal line plotted.
- The top part of the image shows a spectogram, that runs from bottom to the top over time, with newer data on the bottom. The whole spectrogram window shows roughly last 70 seconds. I waited full 70+ seconds with the probe untouched, before creating a screenshot of that area of interest.
- Blue & green colors denotes less signal power in the spectogram, yellow means there are emissions detected in that frequency and red pictures areas of strong emissions/signal in that frequency spectrum.
If you are further interested in this topic, I recommend watching a 11 minute YouTube video by W2AEW about RF near field probes here to get started in this topic. Here is also a link to a very nicely written Application Note by Tektronix about EMI troubleshooting.
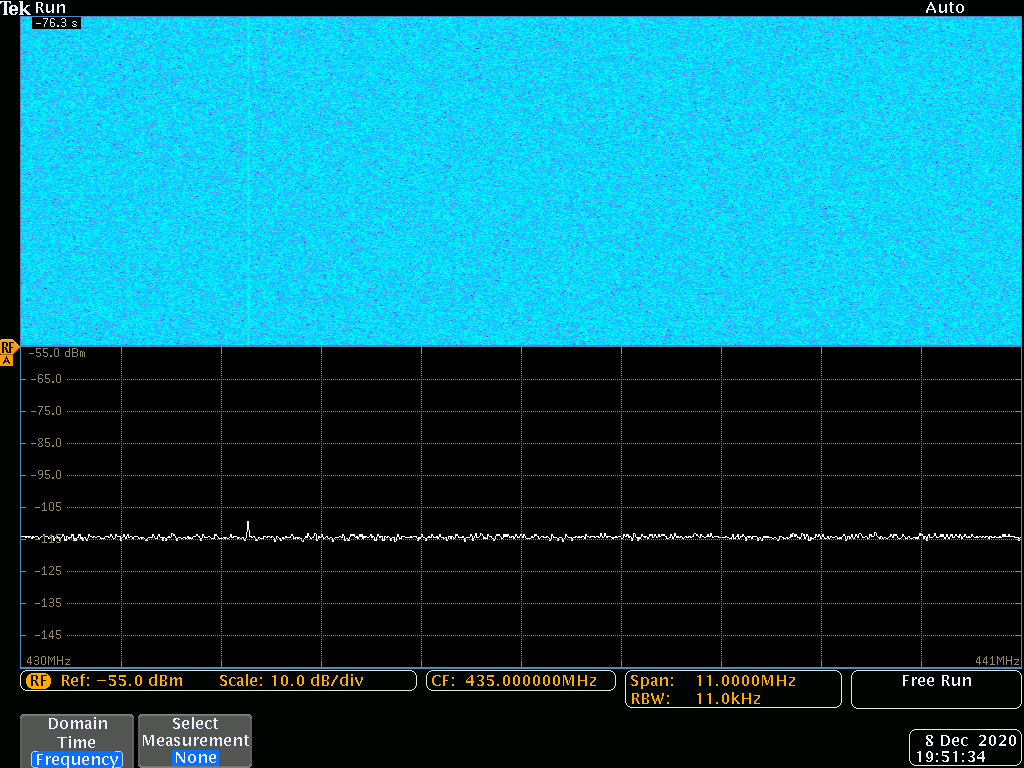
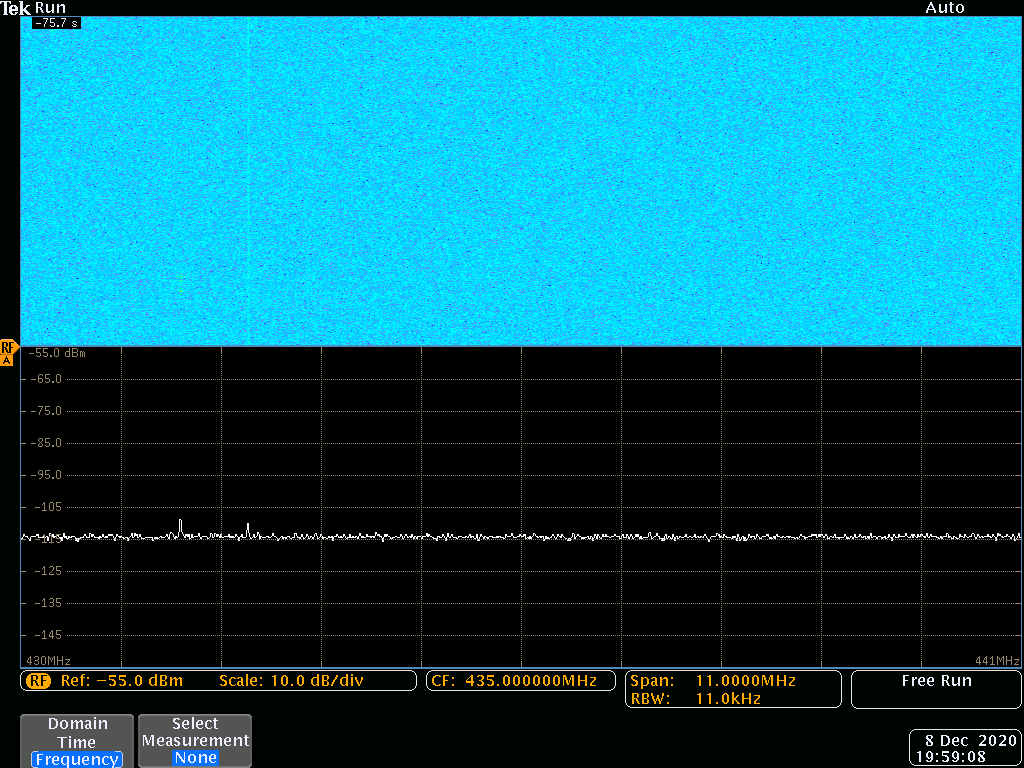
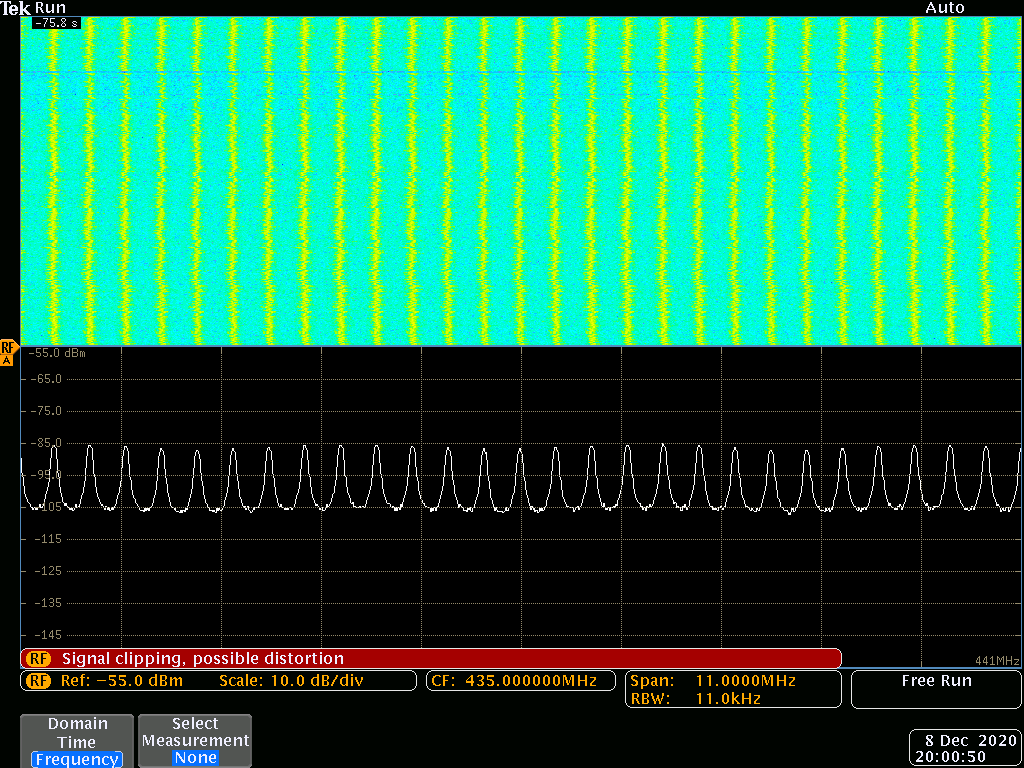
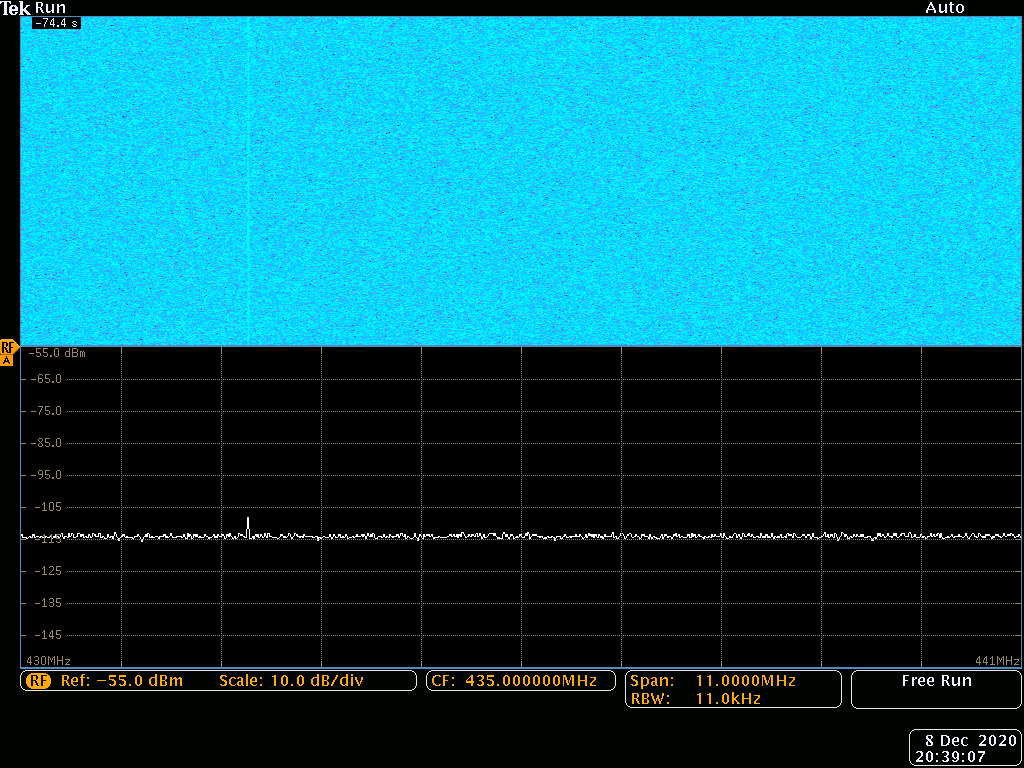
Close-up of 435 MHz +/- 5 MHz ambient:
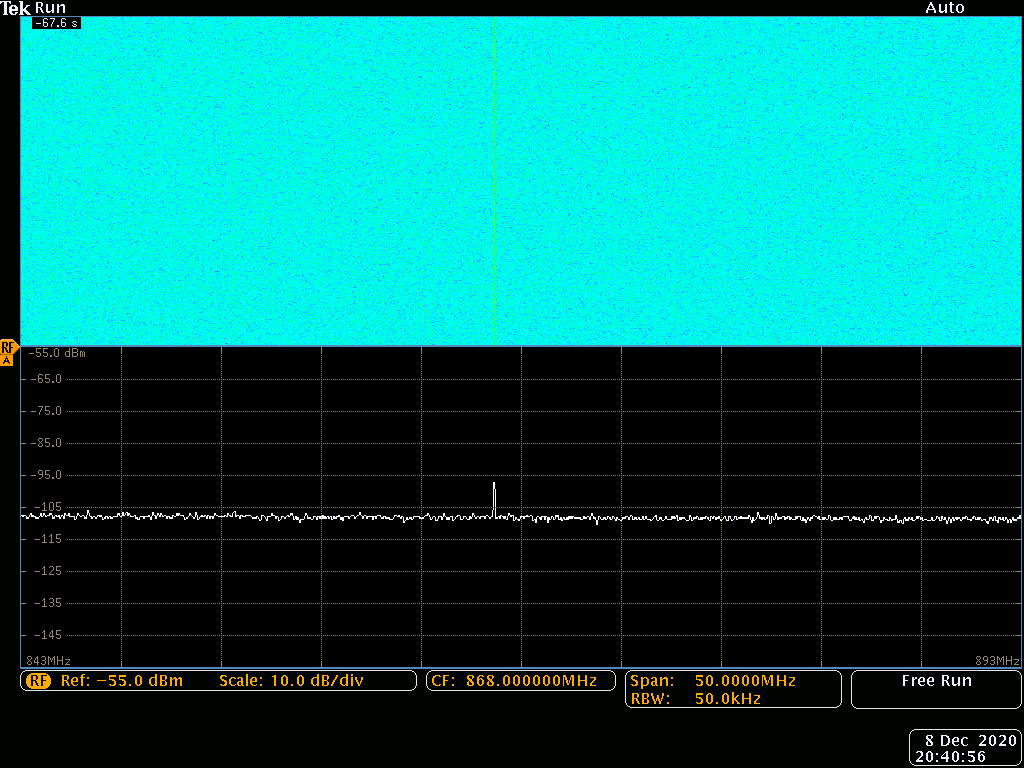
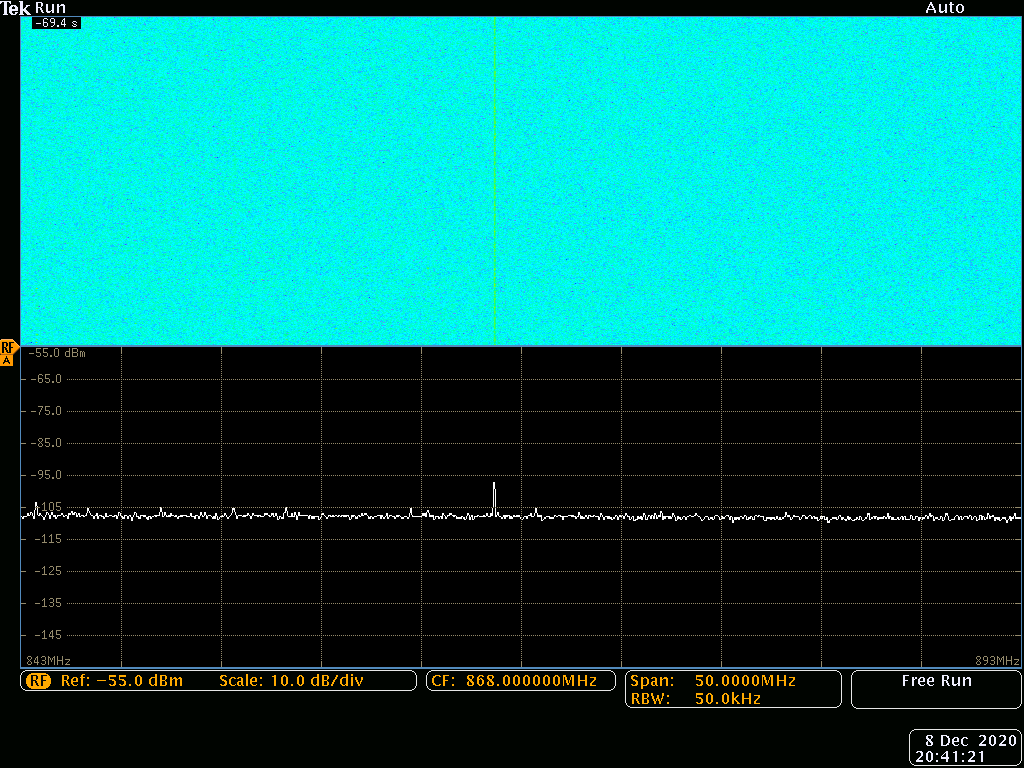
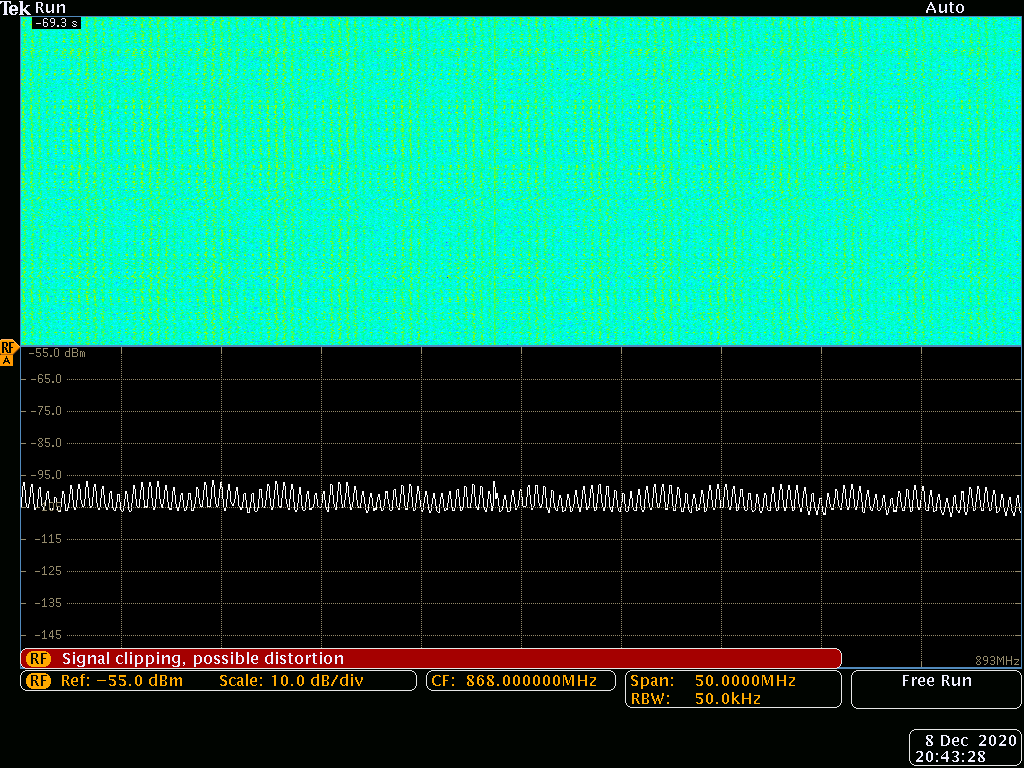
Close-up of 868 MHz with 50 MHz span ambient:
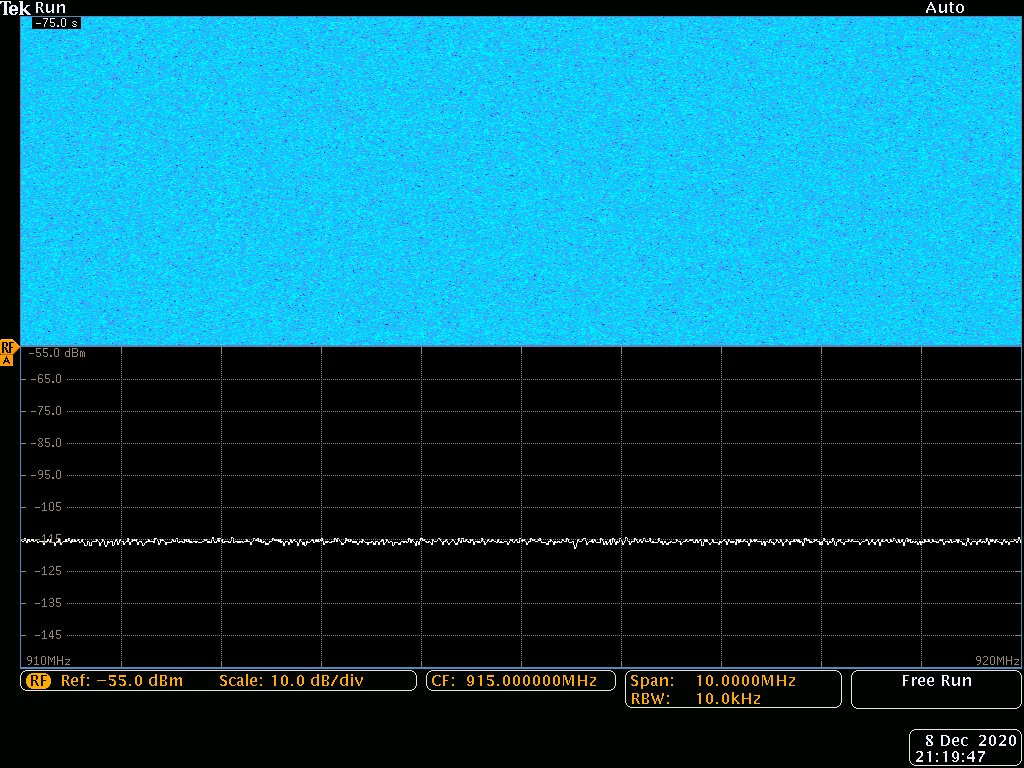
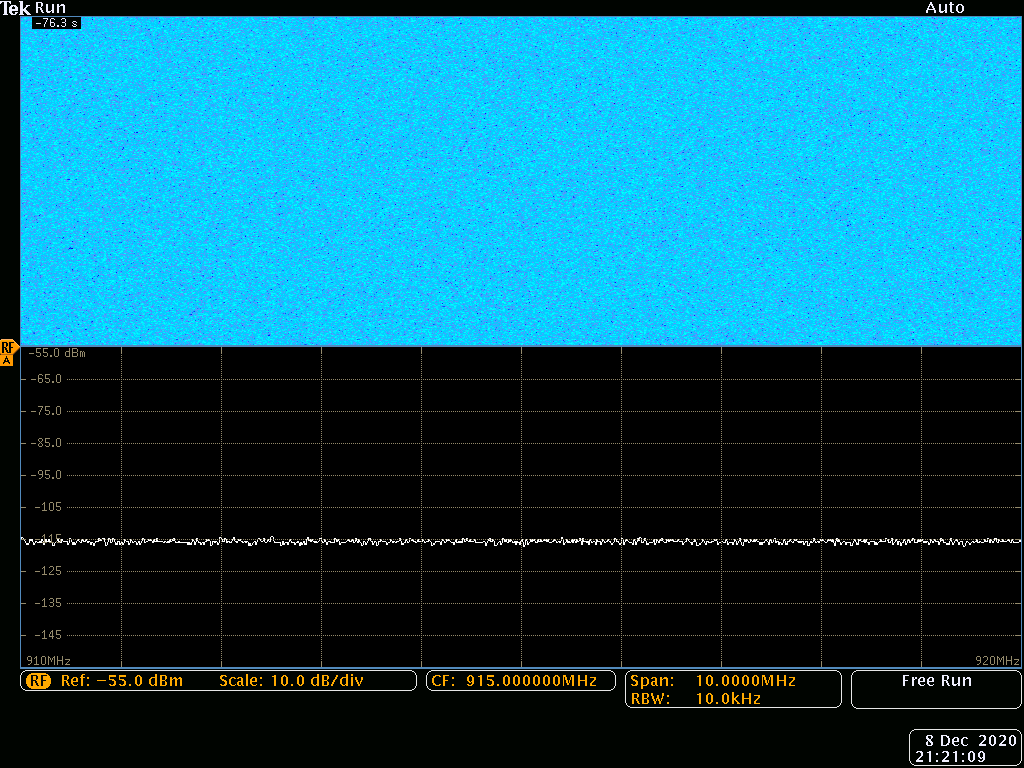
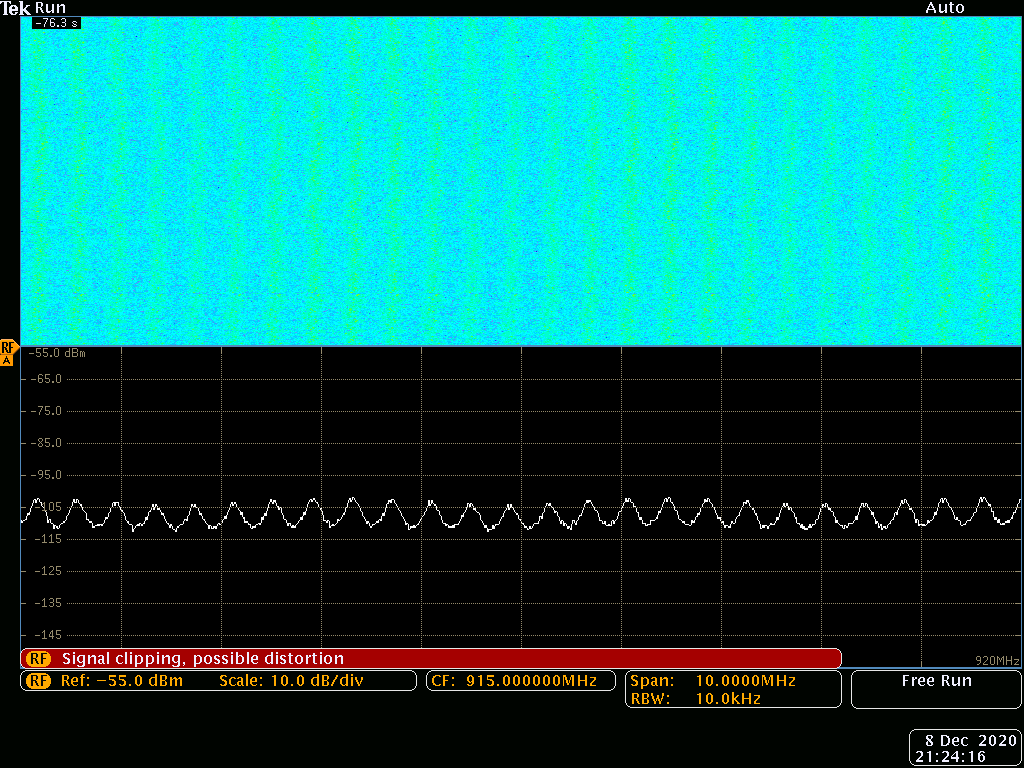
and finally close-up of 915 MHz with 10 MHz span ambient:
Now that we established a baseline, the measurements of the Durandal flight controller can begin:
Well, as the case is out of metal, I did not see anything, except the ambient, which was expected.
To see what Durandal emits, I attached all the cables it came with, to act as maximum antennas and probed them:
Here are the results of 0-1 GHz plus centered around 433 MHz, 868 MHz and 915 MHz respectively:
The results are awesome, basically there are no noticeable emissions from Durandal in the interesting frequencies of DragonLink system. Compared, e.g. with the results of Matek H743-Wing (that I posted in RCgroups here), it is a night-and-day difference in favor of Durandal! And it is using the same STM32H743 microcontroller as the Matek H743-Wing, so has similar powerful computational performance.
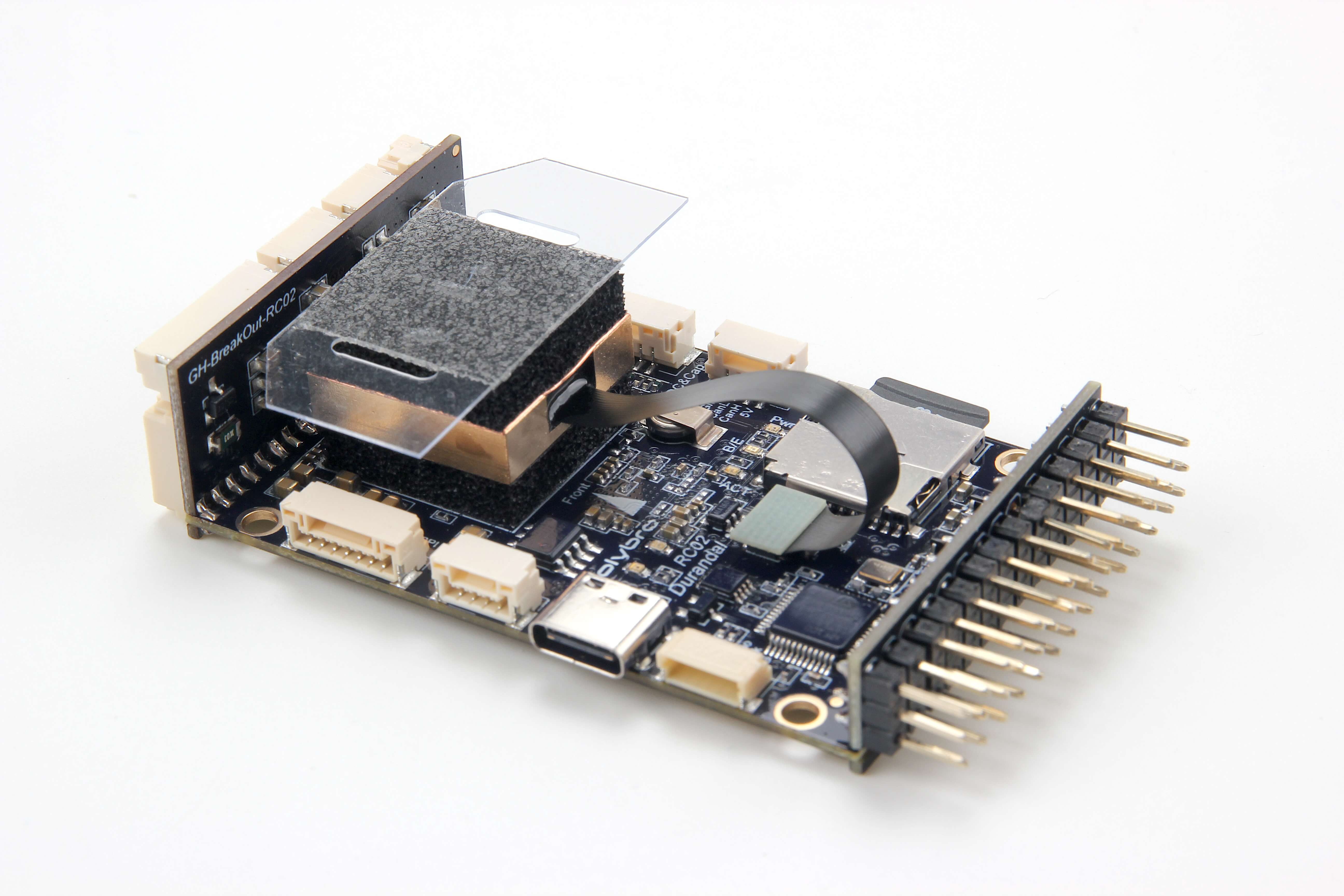
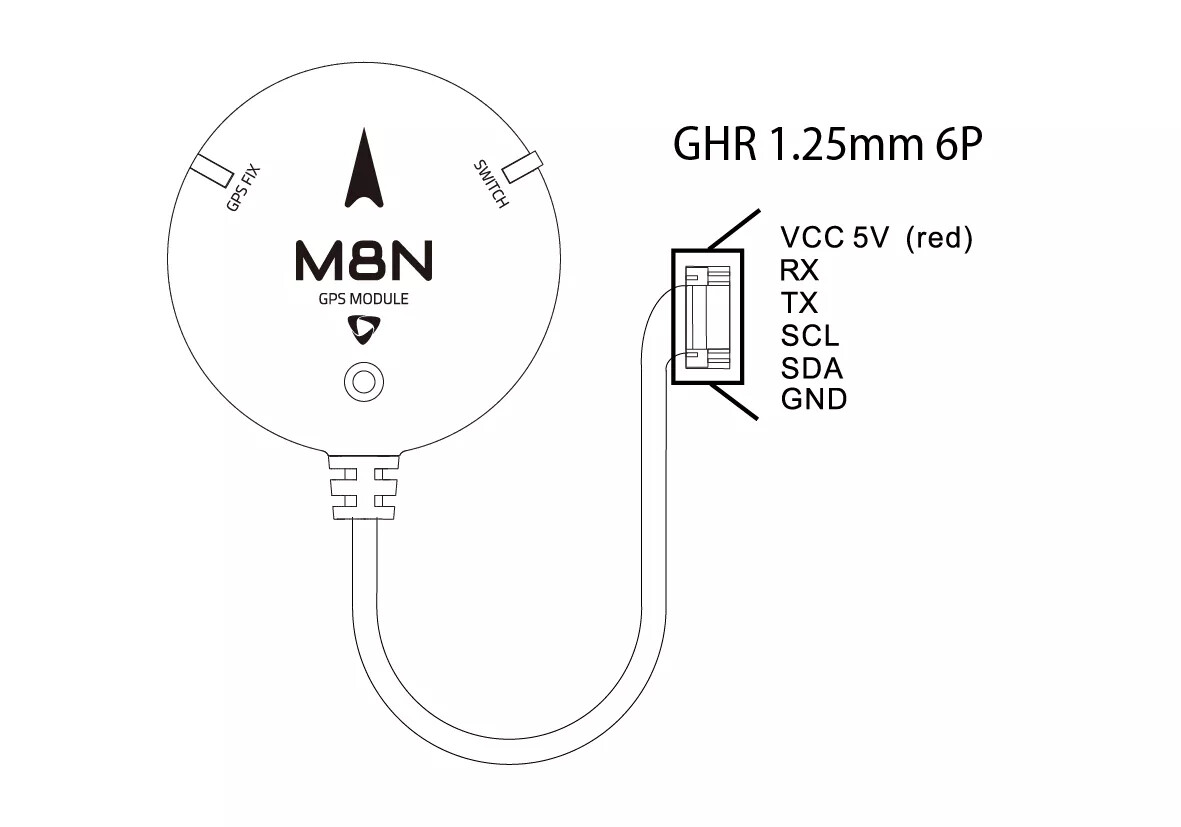
I ordered my Durandal with GPS and PM02 v3 power module, so had a closer look at it as well:
First the 0 to 1 GHz output, then close-ups of 433 MHz, 868 MHz and 915 MHz:
The Power Module PM02 V3 with its DC/DC converter does emit some noise, as you can see in the screenshots above.
This can be luckily easily fixed with some shielding tape. As I have unfortunately displaced my shielding tape and was unable to quickly find it, used kitchen aluminum foil to demonstrate the effect. As you can see in the photo and screenshots below, even the kitchen aluminum foil fully eliminates the magnetic field noise of the DC/DC converter:
If someone from Holybro reads this, considering wrapping the power module in a shielding tape in the factory for the next gen. power module, would be IMHO a good idea to limit the DC/DC converter noise.
In summary, I concluded from my EMI measurements that Durandal, due to it’s super low noise emissions, is going to be my flight controller choice to be used with Dragon Link LRS.
Best,
Risto