Hi,
I’m trying to setup my new AR wing pro, and it’s ok except pitch oscillation which are annoying…
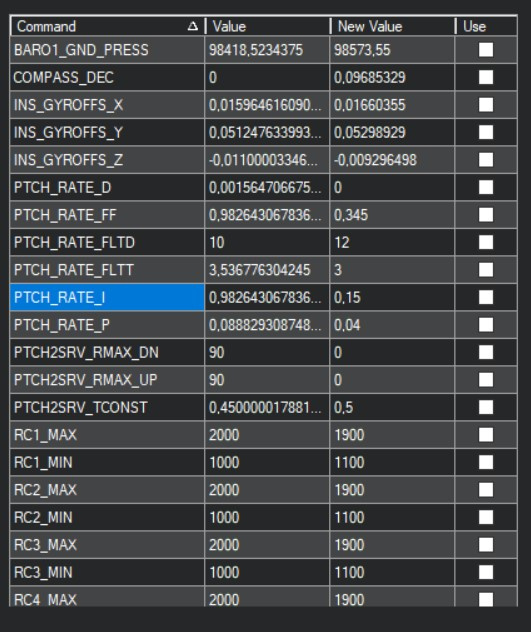
Unfortunately i don’t have log files, but i can see that after autotune PTCH_RATE_I = 0.98 which seems to be higher then advices max value = 0.6.
And it looks like following
I can see oscillations early in the flight they seemed to get better with the tuning. There’s only a little bit of flying in FBWA after the tuning so it’s hard to say how successful the tuning was but from what I see it certainly looks flyable, and reasonably tuned.
I’d say fly it around in FBWA for a while and see what you think. If AUTOTUNE_LEVEL, 7 isn’t enough consider bumping that up. If the performance is good but you still find oscillations, consider turning down PTCH_RATE_SMAX (or roll) https://ardupilot.org/plane/docs/parameters.html#ptch-rate-smax-pitch-slew-rate-limit. I dropped mine to 140 and it seemed to help but that adjustment was a total guess. Since everything worked after that I didn’t need to play more with that value so I haven’t really figured out how sensitive the adjustment is. Proceed with caution.
Post a log after a few minutes of FBWA. Straight & level, as well as some turns.
For really small planes there are a few things worth looking at:
raise INS_GYRO_FILTER, 30 should be fine, but 40 would be reasonable too, depends on noise
if you have digital servos then consider either raising SERVO_RATE above 50Hz, or set ONESHOT_MASK to a mask of the control surface channels with digital servos. Using ONESHOT_MASK means the output to control surfaces is synchronised to the PID calculations, so a bit less lag
raise SCHED_LOOP_RATE above the default of 50. I use 200 for my NanoTalon. Note that this does result in much bigger logs though, so you may prefer 100 or so
we’ve flown planes under 100g successfully. The main issue with planes that small is trying to get the slop in the linkages small enough to be flyable.
Hi,
I made upgrade to beta6, now after autotune P is lower, but still pitch is oscilating. From a video footage (counting frames) it looks like almost exactly 4Hz oscillation.
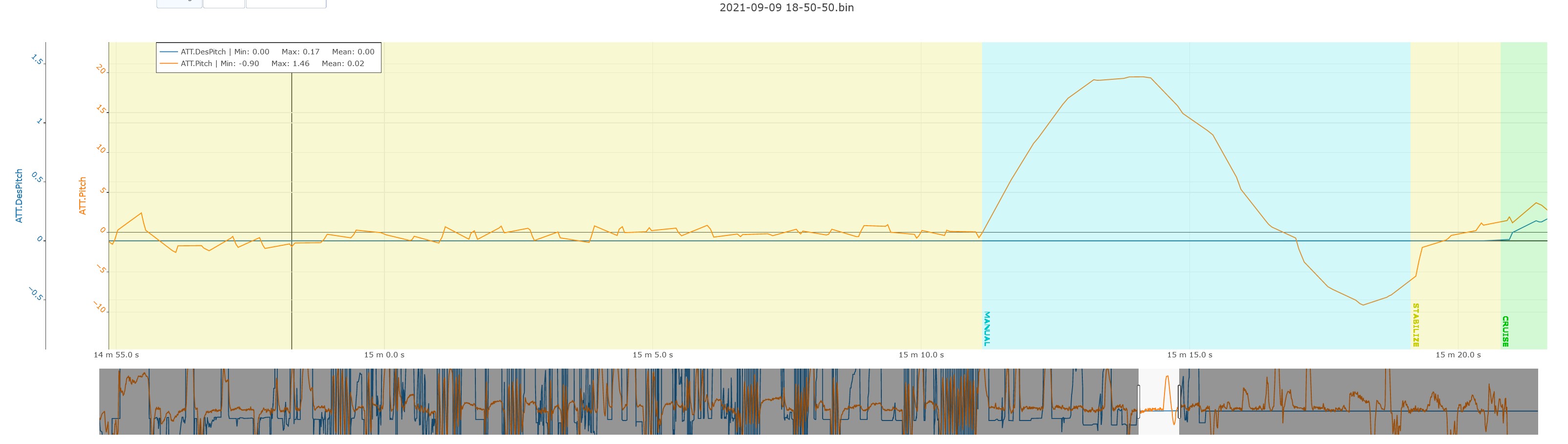
I took a look at log files, but not experienced in this area, end it looks fine, except small oscillations in FBWA and no such a oscillation in manual mode…
In manual mode it flights very well, no oscillations…
PTCH_RATE_SMAX seems to be ok because srate is below 100 most of the time…
One more thing, could i be connected to bad health of the compass? It’s reported in the log.
Kris