Hello,
I’m using GPS_INPUT message for external navigation integration.
For testing the interface I basically take real GPS and forward the data over Mavlink.
For both flights I use 2D GPS data only.
When flying with normal GPS all goes fine.
When using GPS_INPUT things go wrong and I get very high innovations and the drone flies all over the area. The GPS data is stable and accurate but somehow it is not fused well in the EKF.
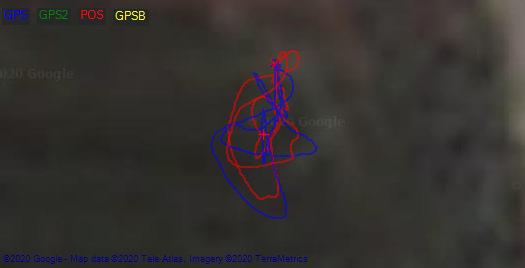
These are example logs of GPS flight and Mavlink flight.
I suspect delay/timing issue or compass/yaw issue.
GPS Flight - https://drive.google.com/open?id=1ZzrfZd0wtPNdakM3yf0VKyeX_aDcabzb
Mavlink Flight - https://drive.google.com/open?id=1t7QeU9d8W7NaQk9zKAq7nvF9Thrlc1fr
Any ideas?