Hexacopter - a DJI Flamewheel F550 with a GoPro takes off, reaches an altitude of 93 meters then falls out of the sky. It’s unclear why. Synopsis from the log file. Any help tips/appreciated
Log File E:\Mission Planner\logs\HEXAROTOR\1\2017-11-13 15-53-46.log
Size (kb) 12406.6181640625
No of lines 142727
Duration 0:07:10
Vehicletype ArduCopter
Firmware Version V3.5.3
Firmware Hash 1a85c237
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (2.76%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: FS_THR
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.42, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1511, 1510, 1535, 1486, 1478, 1539]
Average motor output = 1509
Difference between min and max motor averages = 61
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = WARN - VCC min/max diff 0.431836v, should be <0.3v
Andre-K thanks for the response. The copter is equipped with an X8R receiver. What do you mean by ‘your receiver does not cut the stream’? Made the following changes to the quad prior to the flight
a) changed the speed to 1500 cm/sec
b) changed the failsafe to ‘continue mission’ instead of RTL which was limiting us.
From my perspective we lost power on it’s way home and my initial thought was: Did a connector come loose on the quad or the autopilot. A scan of the quad after we recovered it disproved a loose connection. Of course now the log points to failsafe issues and its unclear if the change in b) had some side effect. Didn’t switch off R/C - at least I honestly don’t recall doing that.
What do you mean by ‘your receiver does not cut the stream’?
the “best” option is to have the RX stop the SBUS/PPM output , to me it seems like you still have an output. , most channels were at 997…999us .
none of the changes you did caused the crash.
The RC radio lost connection midflight, and never regained it. (seems like you planned to continue mission on RC loss)
It did not lose power, it simply did a midair disarm, as it was commanded to by RC.
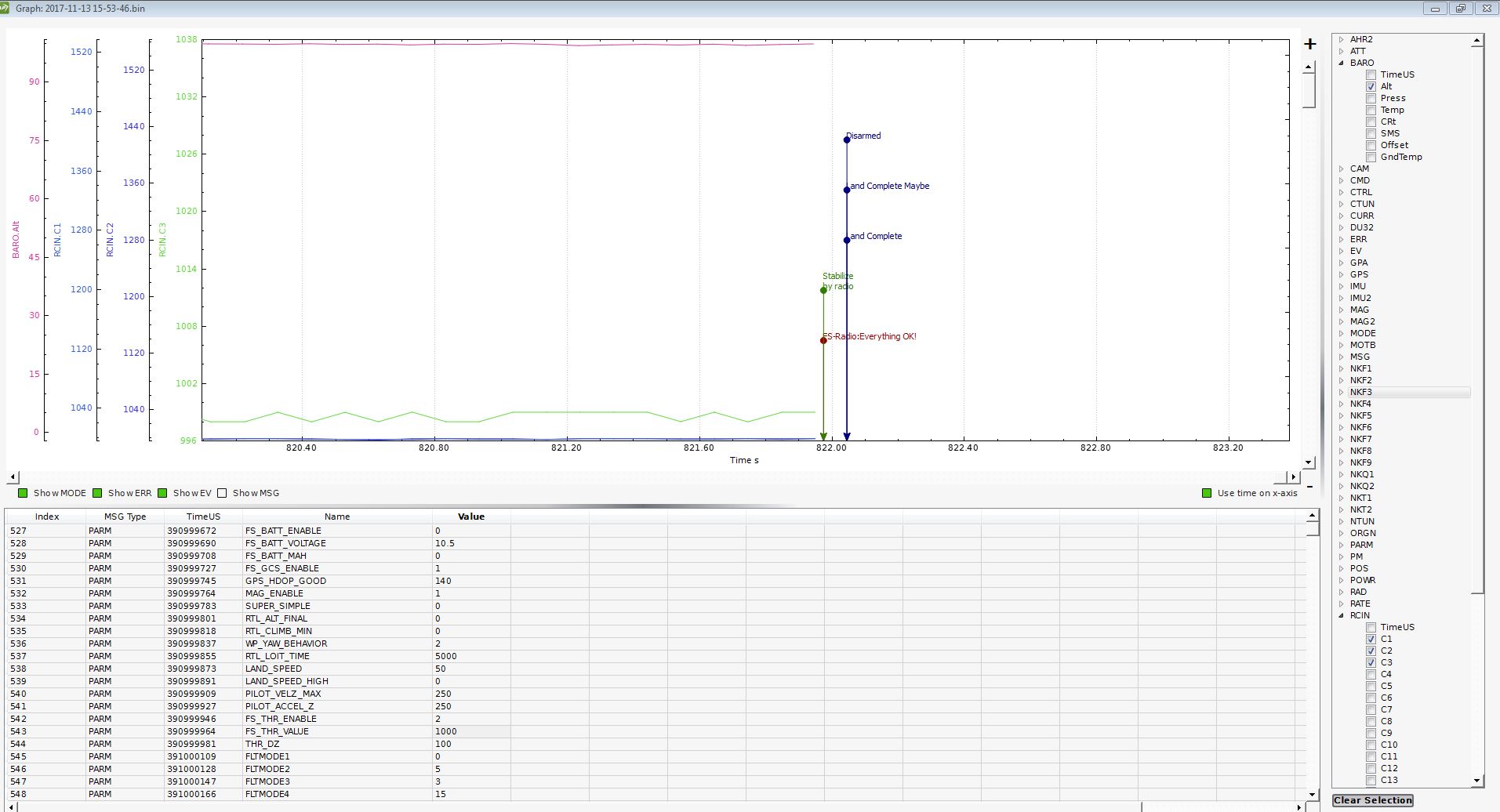
if you plot RC3 input after RC loss, it drops to ~997 , then with time tends to go more toward 999 - at some point it went >=1000 - at which RC was deemed to be ok, and the input were “disarm”
One last question for you. Similar story with this quad except this one went up and fell straight down. Didn’t execute the mission. What’s your assessment from the bin?
is easy. your FS_THR was set to 985, when you lost RC , all RC channels went to ~991us , not trigging failsafe, it switched to stabilize, and set 0% throttle. (2 sec later, disarmed as commanded by the RC)
Downloaded APMPlanner2 given the plots seem to make more sense mainly with multiple entries. Two - I think final question for you. When you said ‘then with time tends to go more toward 999 - at some point it went >=1000’.
With regards to >= 1000. Is that the point where it says ‘Stabilize by radio’?
Also is it safe to assume that for ‘Stabilize by radio’ occurs before ‘FS-Radio: Everything OK’? Just trying to ensure I interpret the events and errors correctly
But on radio recovery, mode is not changed instantly (it need to see a mode change to do so), so I am not completely sure what went on here, but then again, when not configured properly, I did not give that much thought.
RCIN is not logged very often, and so it’s hard to say what exactly went on.
As for “FS-Radio: everything ok” and “mode” order: Mode changes are logged using critical priority level, and bypasses the write queue, so that is the reason it appears as if mode changed before radio were ok.
I have 6 hex with similar configurations - RFD900 transmitter/receiver. Lightbridge video tx/rx , a BEC a taranis RC and GoPro. Assume Auto missions.
If I disconnect the video (i.e. remove the video connection to the Lightbridge) and run the missions with the ‘continue with mission in Auto mode’ option there’s no issues. What would I check in the log file to determine if there’s some current/voltage issue?
Of course disconnecting the video and achieving success is speculation. For the 2 hex that crashed I did have the video hookup and I assumed that might be problem. I also had multiple flights with video hookup and zero issues on the 2 hex’s that crashed hence the all around confusion