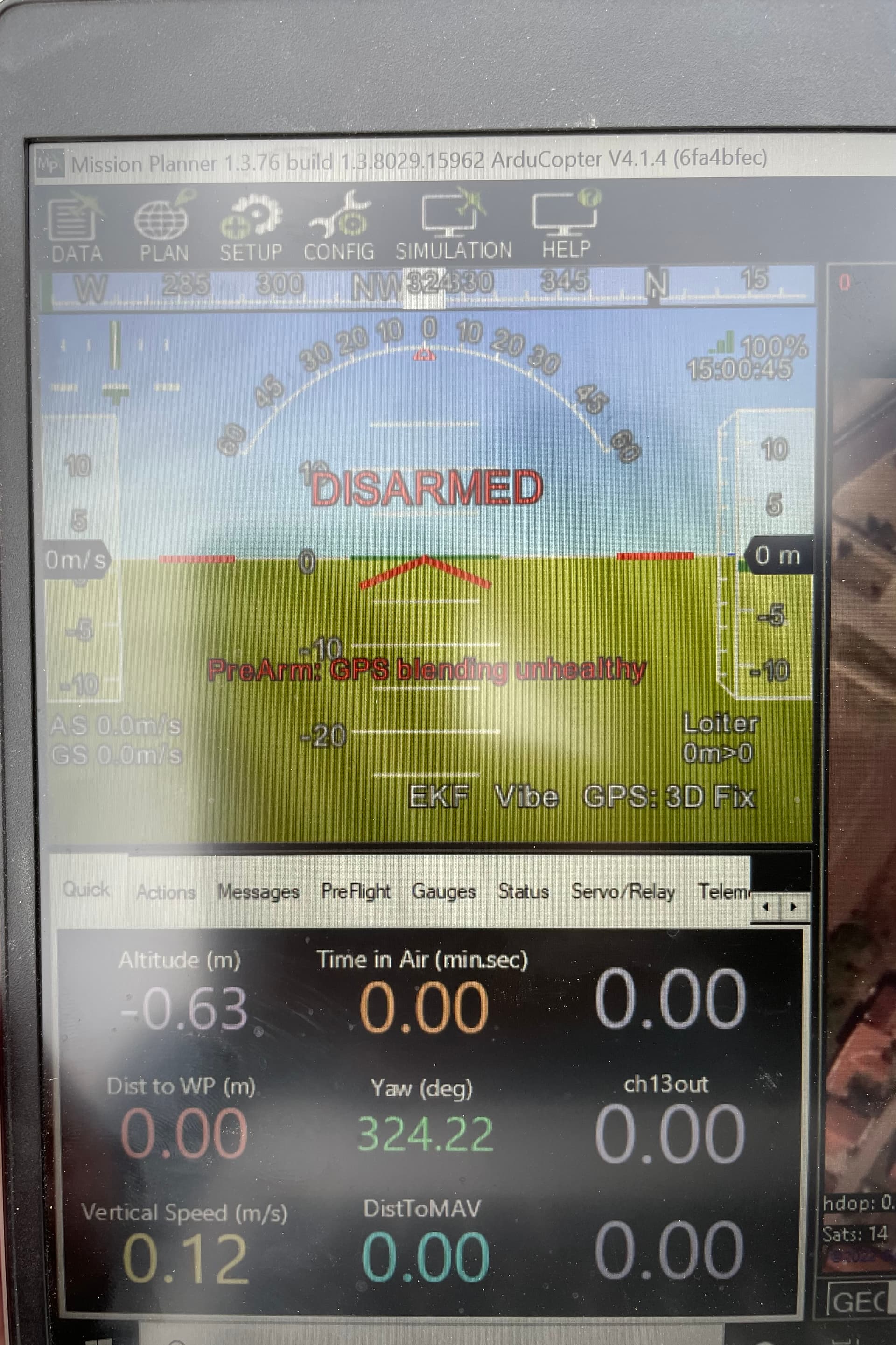
Hi everyone, after updating firmware to 4.1.4 and set everything up i was ready to fly with my drone. Flights in Stabilize and Althold mode were successfull, but when i tried loiter mode drone crashed. I will put log here so you can see what im talking about. However in Stabilize and Althold mode drone is unstable, and always late on my command. Im trying to set PIDs but im new to this. The drone is quite big, i would say like DJI MG1S. If someone can open log and try to explain me what happened i would appreciate it. Also PreArm check say “GPS blending unhealthy” only in Loiter mode and calibration of the gps was successfull in strict mode. Thanks!
You are confusing GPS blending and compass calibration. Those are different things, and different signals. But yes, GNSS receiver and compass are both housed inside the commonly called “GPS module”
I understand your point, but GPS blending wouldnt be possible if both GPS ( one inside cube and one external) arent calibrated well, so there is connection between this. Did you open the log?
There is no GPS receiver inside the cube. GPS blending must be done using two GPS receivers from the same brand. Sou you either have two GPS receivers and can do GPS blending, or you don’t. You do not calibrate GPS receivers.
As for compasses, you have at least one compass inside the cube, and typically one compass inside each GPS module. Compasses will not be blended, they are used independent of each other. Compasses can and should be calibrated. Most times you should disable the flight controller internal compass, but not always. Contact the board manufacturer, to ask.
Compass calibration will not affect GPS blending. But yes, you must calibrate the compasses.
If you do not have multiple GPS receivers from the same brand you should disable GPS blending.
No, I did not open the .bin file.
I understand it better now, and im not using two gps receivers only one here 3 module, thats why im confused why it is showing prearm check gps blending unhealthy. Why is it showing that if i dont have two gps receivers. Then I turned off blending mode in parameters gps_switch (put 0 value so it reads only main gps module, and i put external as main) and then drone crashed in Loiter mode. Thats why i need, and if somebody can look at log
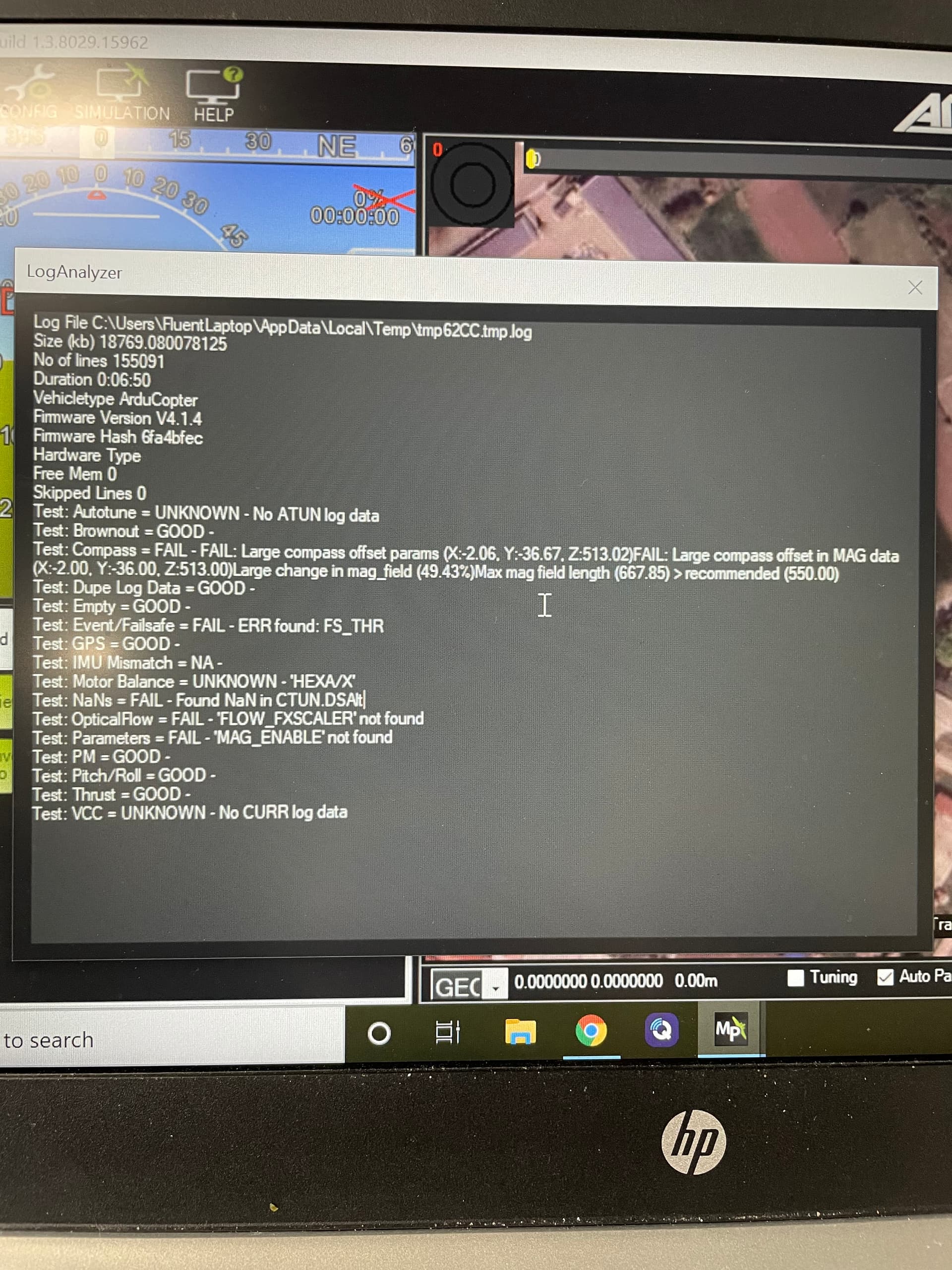
to see what i have done wrong… maybe PIDs…