Hi! Can anyone help me figure out the cause of our plane crash last Monday? We were testing our custom flight mode on a new airframe (1880mm Skywalker). Our custom flight mode was initially tested on a Bixler frame and we did not have any issue like this. The first trial went well but in the middle of the 2nd trial, the Skywalker tried to reach the target altitude but it inverted its position during the process. Then, we switched to Auto mode to regain the proper attitude of the plane and it did. However, after reaching the 3rd waypoint, the plane suddenly decreased its altitude and crashed to the building.
My best guess is that something shifted internally in your plane, or something broke, when you were maneuvering aggressively (by accident). But I might be wrong, and others might see something I didn’t.
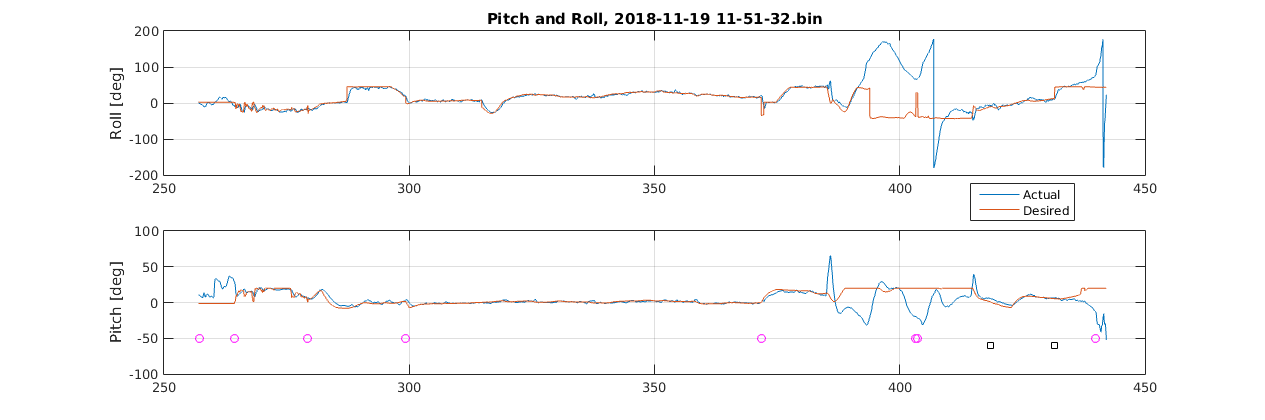
Here’s what I see on my plot: Plotting desired vs actual Roll and Pitch, we see good behavior for the first part of the flight (between 260 and 370 sec). Your experimental mode is active from 370 to 405 s, and we see wild behavior. You switch back to auto at 405 s, and we see the plane recover itself, flying normally by about 415 s. However, it’s desired Pitch and Roll are being actively adjusted, for some reason, and the plane is not able to track well like it did back around approx 280 s. Something may be wrong at this point, it’s unclear. Upon completing WP 3 and beginning WP 4, a turn is needed (see the red DesRoll line jump to 45deg. It was able to make this kind of turn before, at 290 s.) However, the plane makes the turn, but begins being unable to hold the correct pitch. It knows that it’s crashing, but can’t prevent it.
From this, I conclude there was something mechanically wrong. Perhaps the CG shifted during flight… but I’m not positive.
Do other folks agree, or did I miss something?
Here’s the plot. In the bottom, I have marked all mode-changes with a pink circle, and the last few waypoint-commands with black squares. (the values of -50 and -60 are irrelevant, just puts them on the plots out of the way.)