Hi!
Please help me understand the reason for the crash.
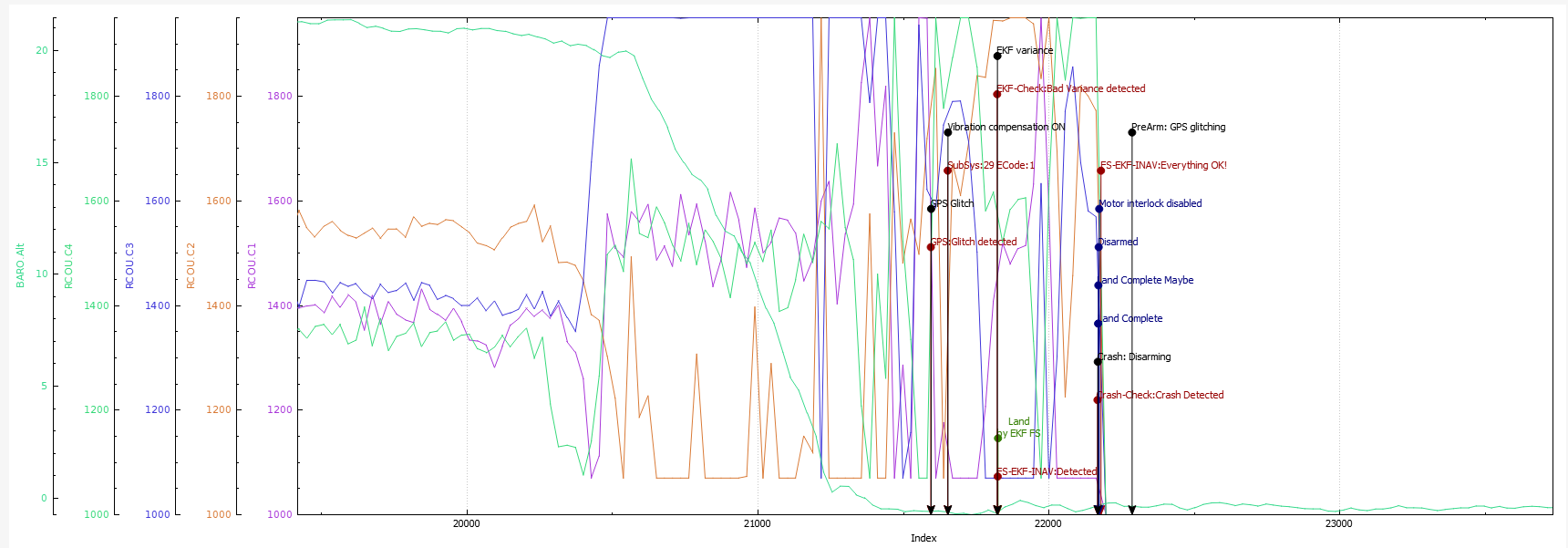
Fell 2 times with the same symptoms. The copter hangs in loiter mode, immediately after the start of the descent on the command from the stick, the copter begins to sway and at the very end of the fall, turns over.
According to the log, it looks like a malfunction of the S3 motor. But I tried to drive this motor in manual mode, it did not turn off, it worked normally.
hi @AndreyI
it seems that losing motor3 or ESC3 is main reason of crash
but if motor and ESC 3 are OK , there is another problems could confuse EKS measurement and make a crash like this
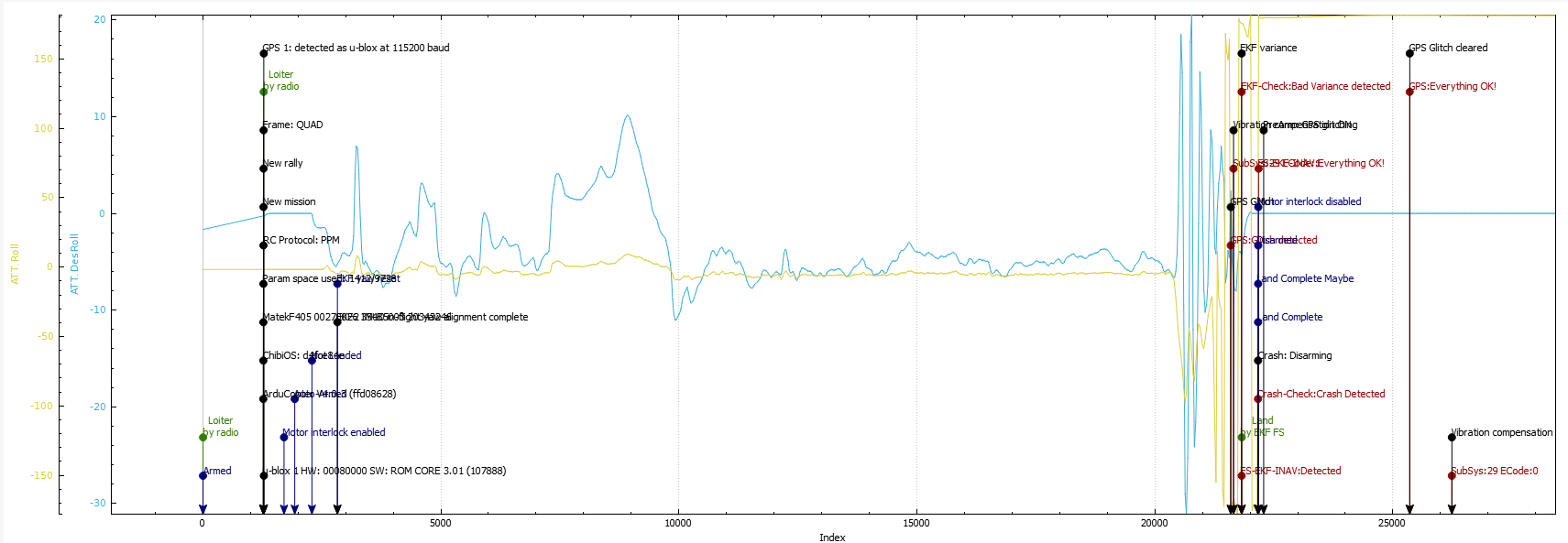
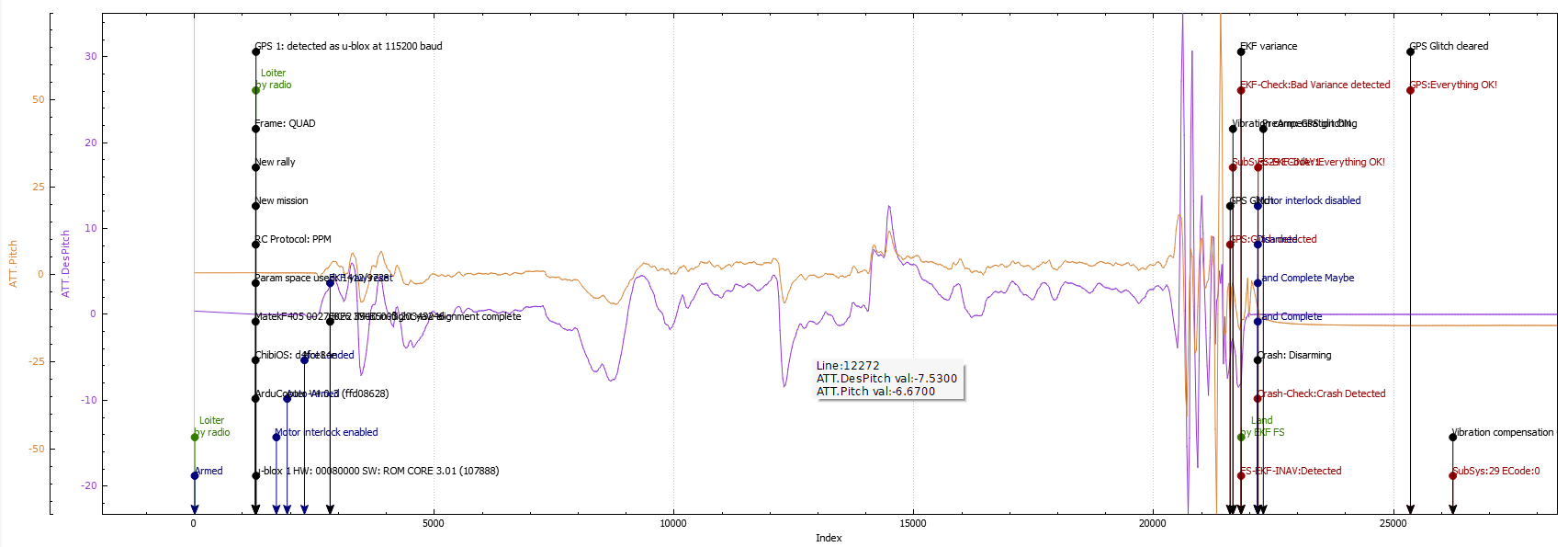
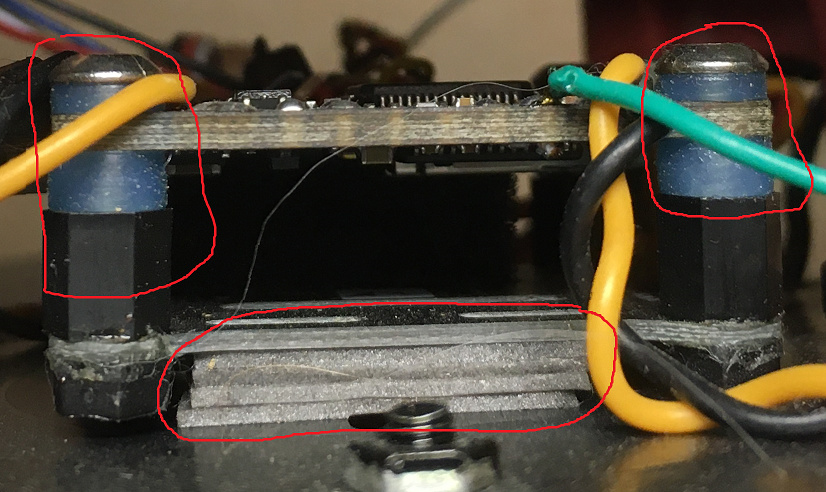
first noise on all axis is high , did you installed any vibration damper under FC ?

second is poor tune of your copter
did you completed tuning process instruction ?
This is how the flight controller is installed:
Yes, everything was done as written in the instructions.
C3 and Motor3 in the picture, is it the same?

hard wires could transfer vibration from body to FC also you can try softer vibration damper or add some mass to your FC
test motor 3 with motor test menu in mission planner
Thanks. I found a fault. When checking again, I found a faulty regulator.