After successful compass_learn=3 and auto-tune flights, I made a 6 minutes proving auto mission flight. This copter, EDU-450, has a chronic yaw issue - but otherwise seems to perform well. It also requires mag offsets beyond the published ranges.
The graphs for desired and actual pitch and roll seemed to match up pretty well to me - but I’ve still got a lot to learn.
If someone has time, I’d appreciate a quick look at the BIN file for possible issues.
BTW - my TD-650, which shares the same type arms and identical body/motor mounts - has the same yaw issue - might be a flaw in the shape of the mounts.
I think you could change these:
ATC_ACCEL_Y_MAX,14000
ATC_ANG_YAW_P,6
ATC_RAT_YAW_FLTE,2.0
as a starting point, see if that helps, then probably just run a yaw Autotune.
Pitch and Roll are tracking very well.
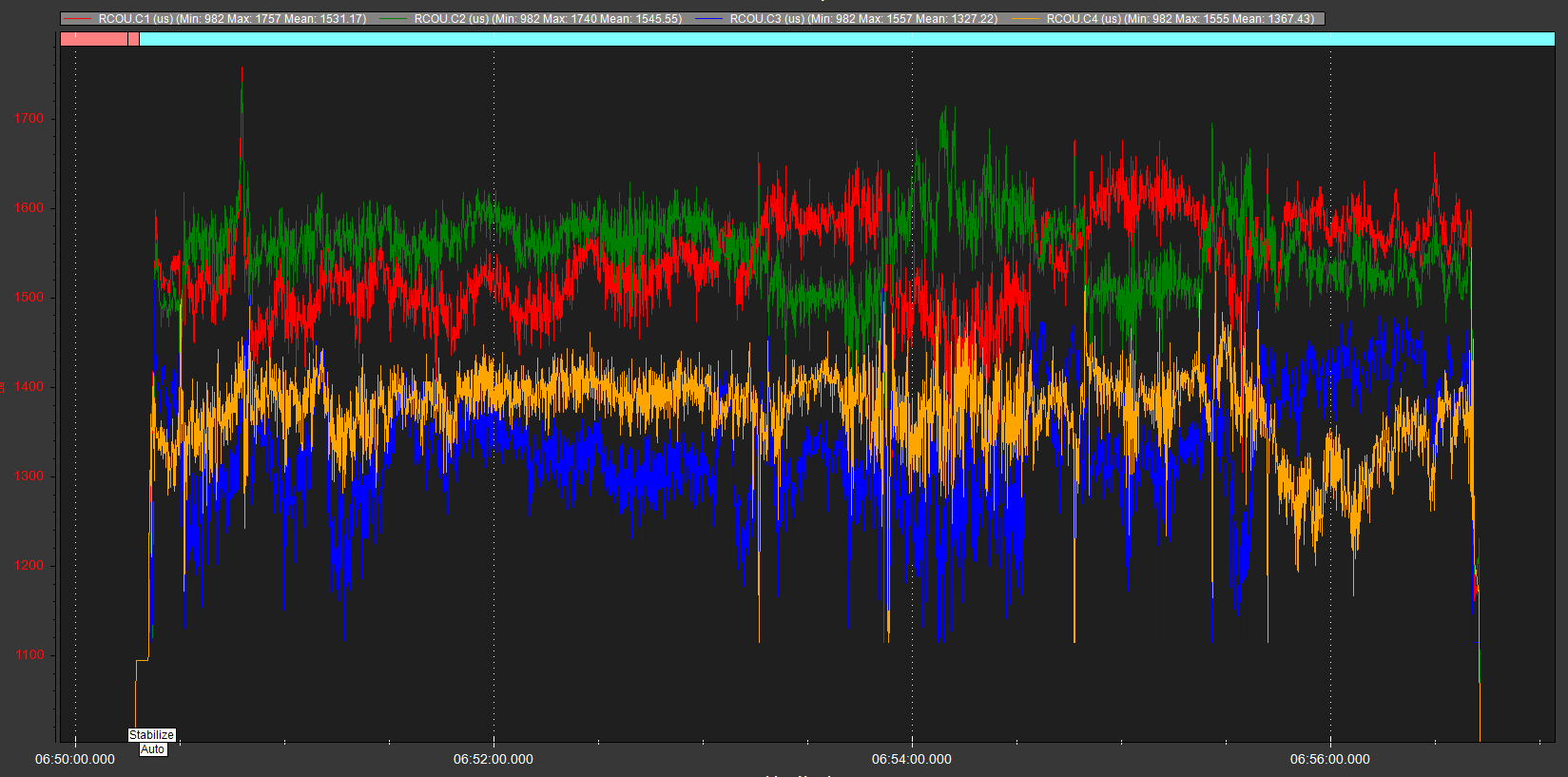
There’s quite a bit of difference between clockwise (motors 3,4) and count-clockwise (motors 1,2). 1 and 2 are generally working harder in order to counteract some physical yaw issue. I know it’s practically impossible to mount those arms and motor mounts incorrectly, but there’s something going on there.
You should be able to look from side on, and all the props will turn within exactly the same plane. None should be tilted.
I cant remember if the EDU450 has dihedral on the arms or not, but you should be able to rotate the props around to a position where the tip of each prop “points” at its neighbouring prop. Any that a misaligned will need fixing.
You may be able swap around motor mounts or arm mounts to get a better fit.
As I understand your suggested parameter settings, these all decrease the copter’s yaw response. Can you please help me understand why these suggestions may improve my copter’s performance?
I can’t find graphs in MavExplorer or Mission Planner that I can understand about yaw performance.
Regarding the physical yaw bias - I’ve been tracking that ever since my first flights with this copter - it was an item that Mission Planner’s Auto Analysis report flagged. I graph RCOU regularly - sometimes its better - sometimes it’s worse.
The arms do have dihedral - making it hard to see misalignment. I did find carbon fiber tubes that fit snugly on the motor shafts - they helped me do an eyeball check for alignment. The four tubes, each about 24" long - all seemed to similarly oriented.
I do suspect there is some physical misalignment. My TD-650 has a similar issue - and they both share the same mounting blocks at both ends of the arms. Since the motors don’t run hot, I’ve turned my attention to other issues. But it does nag at me in the back of my mind - copter tuning OCD…
On my missions this week with spline and loiter waypoints, I noticed that the yaw changes weren’t smooth and continuous - the yaw changes were “notchy” - little changes every few seconds. On my flight yesterday, I tried to reduce this by increasing the mission’s speed, and changed wp_yaw_behavior from 1 to 3. (face waypoint to face GPS path) These changes reduced the yaw notchiness, but doesn’t eliminate it. (I applied image stabilization in post processing of the video on yesterday’s flight that pretty much eliminates the notchiness from the video. The video from two days ago before any of these changes dramatically show the yaw notchiness.)
Thanks again for you kind assistance - I appreciate it!