Currently only one side of my Skid Steer vehicle wheels is moving from Throttle input. I have been reading several forum posts but have not been able to get the both sides set of wheels to turn with Throttle input. Also when the wheels are spinning only on one side based on my throttle input, there is no reverse, and it jumps from slow to fast and to stop speed unpredictably.
I would like to get a basic Skid Steer Rover setup going. Thanks in advance for your help.
Sabertooth Operating Mode:
Independent Lenear Control. (working great with receiver to contorller with no apm in between)
1 off
2 on
3 on
4 off
5 on
6 off
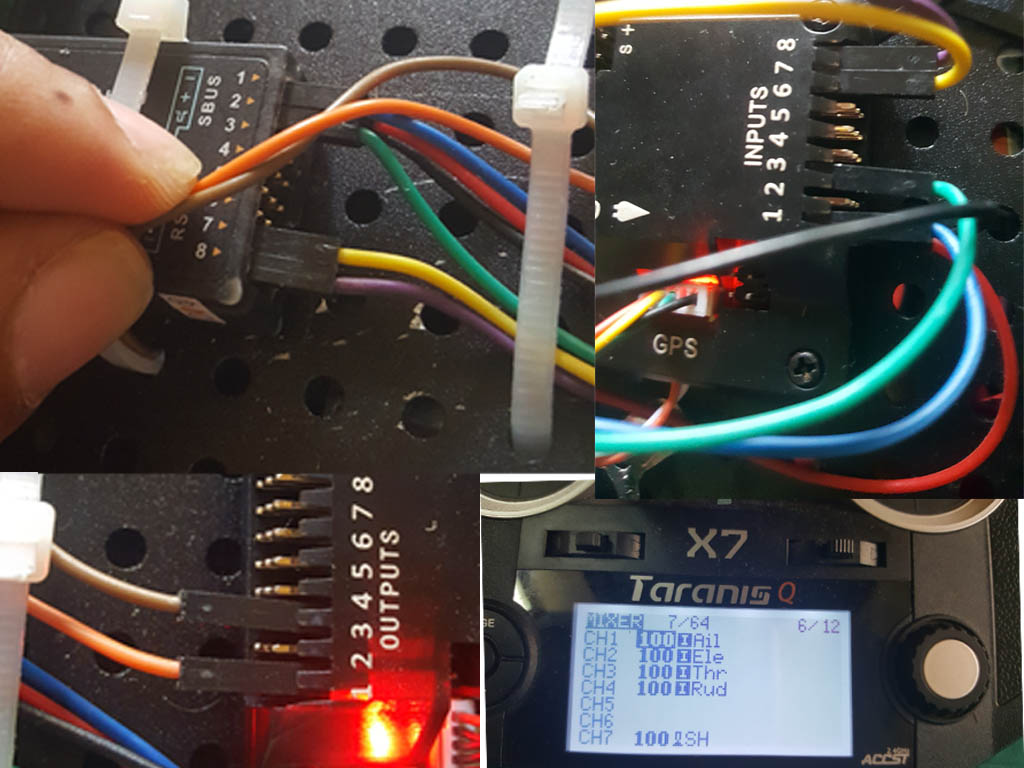
Reciever to APM Pins (As shown in image above)
1 - 1
2 - 3
7 - 7
8 - 8
Taranis QX7 Transmitter Channel Mix: (As shown in image above)
CH1 : AIL
CH2 : ELE
CH3 : THU
CH4 : RUD
CH7 : SH (Momentary)
CH8 : SC (Three Position)
Thank you for your response! I am new an stressed.
Yes, if i swap the connectors the motors on the other side would spin instead.
I have a Sabertooth 2x25 Motor Controller driving the Motors.
I was able to get both sides wheels to move when I switched the Sabertooth 2x25 Motor controller to Mix Mode,( from Radio Control) however on start up, the motors would just keep spinning (in the reverse direction) and i cannot stop it with my Transmitter, only by pulling the power to the motor controller.
I should also note that i am using two batteries, I am powering the APM though a 2s Lipo via the Power Module that came with the APM and powering the Receiver from the output of the APM. I am powering the motor controller from NiMH separately.
Thank you for your reply, I got it to work! In case someone reads this and has the same issue.
When running APM 2.8 here are some notes:
When using external compass, remove the jumper beside the GPS port
If you get BAD GPS Health , or GPS: NO Fix, it may be because you are indoors and not outside getting better GPS reception. click the Status tab ui on the left below “GPS: NO Fix” and scroll down if gpsstatus has a 1, your fine, bring the vehicle in the open outside.
Use Ele and Ail on your transmitter for steering and forward/reverse channels and not throttle as you will have no reverse. connect the channels from AIl and Ele to APM inputs 1 & 3
Skid steer Input is disabled, Skid Ster Output is enabled
Use the Sabertooth 2x25 in Linear Mode. 1 OFF , 2 ON 3 ON, 4 OFF , 5 ON , 6 OFF
Use one 3 position switch (for Mission planner mode switching) and one Momentary switch from your transmitter through the receiver going into the APM inputs 7 & 8
You may have to reverse your accelerometer direction If your wheels are moving in the reverse direction (if you simply change the weight (reverse it) on your transmitter, your APM will still move in reverse in auto mode)