Wasn’t sure which discussion group so please feel free to direct me to the best one and also any other advice will be much appreciated for a noob!
Just finished my 1st build of a quadcopter using a pixhawk 2.4.6. Just back from my second ‘flight’ and neither was as stable as I hoped…but then was I expected too much…hell it flies right
I’m looking for some guidance on some things I’m seeing if anyone has the time to look and help.
A few initial things: -
The quad doesn’t seem very stable (ie. doesn’t sit balance in the air, it kinda has a jutter around the horizontal - best way I can describe it.
It seems to struggle to maintain alt hold and requires constant thrust changes as it’s either rising or falling
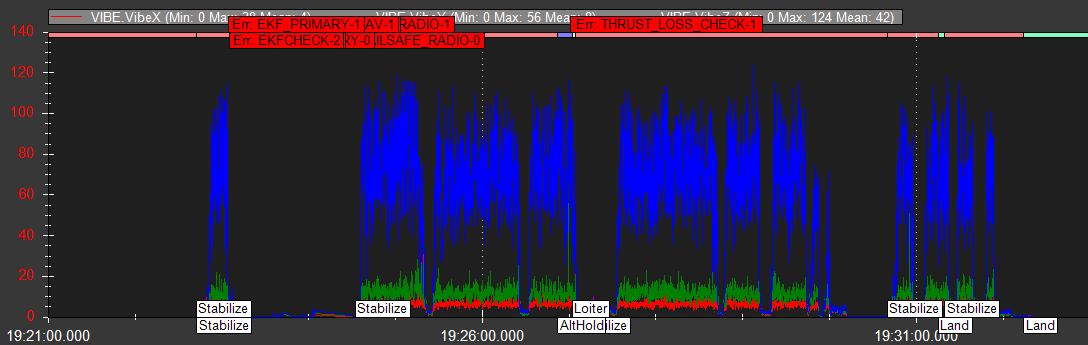
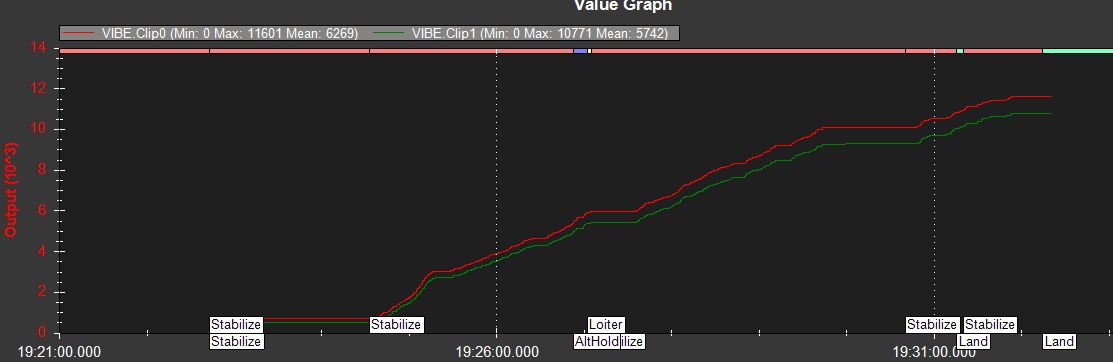
I see from the logs (auto analysis) that there’s some failures - IMU Mismatch, TS_THR, GPS_Glitch, NaNs fail
I’m adding links to the log file and picture just FYI. Appreciate any feedback before my next flight albeit I brought the copter down a little hard and one of the props has stopped spinning so guessing a cable break to a servo!
Thanks to you both (Asim and Dave) for taking the time to reply.
I have done (as best as I could follow) the basic tuning. I haven’t done any in-flight tuning as I haven’t fitted a telemetry tx/rx to the drone. And yes, it’s an F450 daisywheel with an Ublox M8N as the primary.
@Dave - yes I know/thought it was ‘bad’! I’m just not skilled (experienced) enough to understand the logs and know what to do when I run into trouble…I guess we all start here!
Yepp, collet style prop mounts…again, being a newbie you tend to go with cheaper options as you don’t really know how to decide what you need and where to get it. I read the thrust tables and thought ‘they seem ok, not brilliant but ok’. Actually for a 450-550mm drone it’s not really obvious what motors are correct as the majority seem to be high rev racing drone servo’s. So I assume you’re saying I should go for motors with a thread on the shaft?
Mmm, you say ‘this is as bad as it gets’…well let me tell you , I took it for another flight after a couple of tweaks to the PIDS and also removing and replacing the props/mounts and tightening and I managed to go from an IMU mismatch of around 2 to now 4…so yeah, it’s worse but the motor balance is good.
I’m using 10" carbon nylon props just out the bag BUT I don’t have a prop balancer to check them so assuming I need to get on and get one of those?
Any further advice/point in right direction would be helpful.
It also seems I have too much noise (is that right) on the IMU.AccZ and VibeZ which perhaps is what your graphing as well above?? I just don’t know what all these numbers mean other than they seem problematic
You don’t need telemetry for in-flight tuning but you are far away from doing that. And in many cases you can just do an Autotune. In-flight tuning is an advanced technique.
As I said forget about Auto Analysis, it will tell you nothing of value at this point.
You absolutely need to balance the props but with those poor quality motors, that seem to come with every cheap F450 kit, it may be hopeless. There are countless threads and guides for these F450 frames. Motors typically used are 2212-950kv or thereabouts. Buy some motors with threaded shafts that take nuts. Not collets and not self-tightening.
Thanks Dave. I’ve just ordered a new set of 2212 920kv with threaded shaft so will now sit and wait their arrival. Also bought a prop balancer at the same time so will be interesting to see how unbalanced they are once it arrives. Appreciate your input.