Our quad experienced a strange, relatively minor crash yesterday that I am trying to determine the cause of. While flying in guided mode navigating between set points on the map the quad seemed to be suddenly confused and performed a wild maneuver in the air and almost corrected before “landing” in a bush. My initial guess after inspecting the craft was the external compass had come loose and had twisted in a different direction, but after reviewing the log, I’m not so sure. I would appreciate some assistance in reviewing the log to determine the root cause - so I can avoid this situation again.
The quad was flying very well right up until the crash. Also of note, I recently rebuild this quad after a significant crash and have been spending a fair amount of time tuning the quad’s pid, especially P and D gains.
It probably was motor 1 as you suspect, sometimes it’s hard to tell unless the same fault can be recreated in testing.
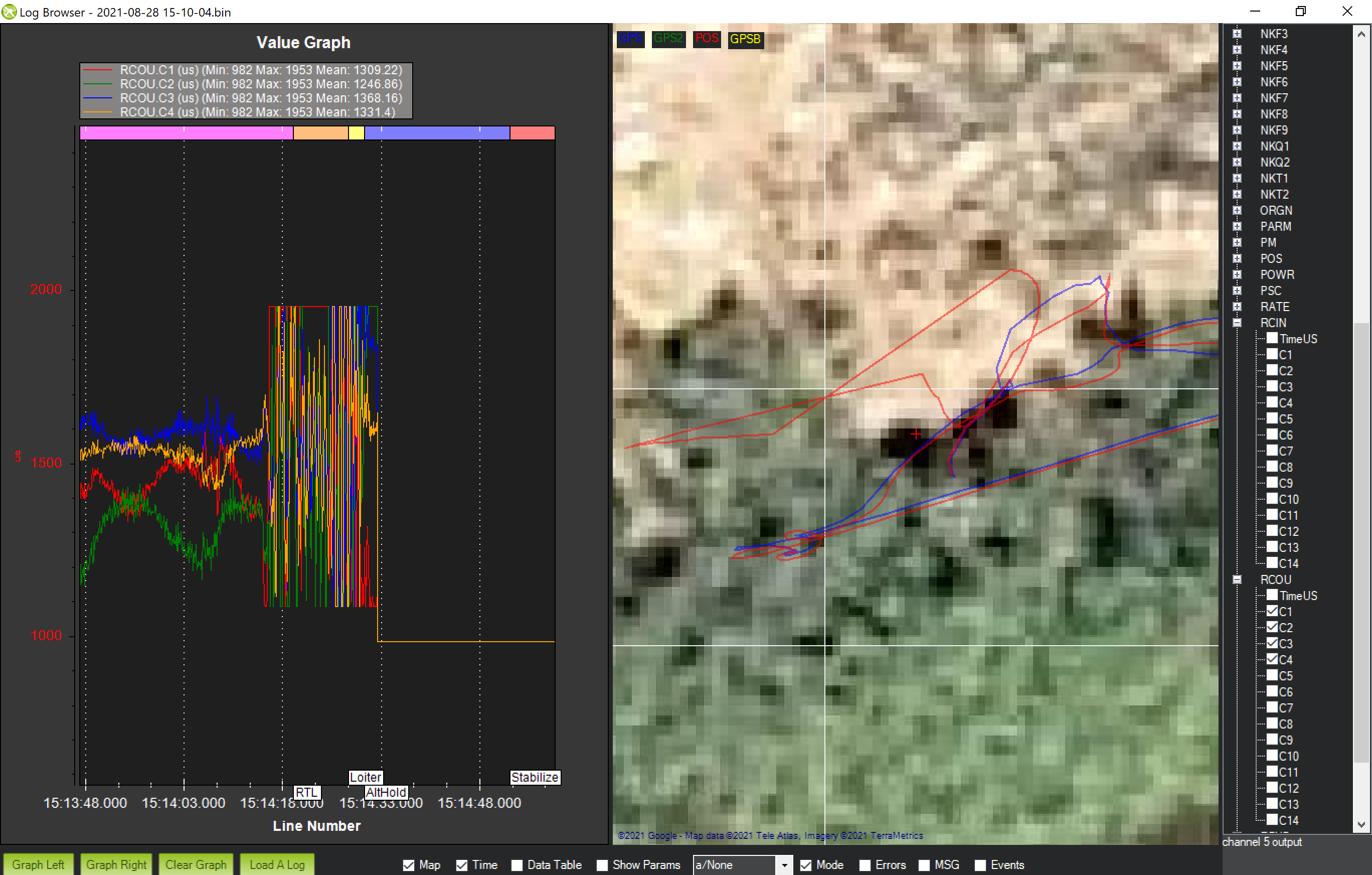
Be aware that motors 3 and 4 were commanded to slightly higher output and motor 2 slightly lower than typical, while motor 1 was commanded to almost nothing. Could there have been a sudden shift in weight, something came loose? I cant tell why because it’s not really reflected in attitude control.
Then Motor 1 was commanded to maximum and all motors start oscillating between high and low outputs to some extent. It wasn’t until AFTER this action started that attitude control was being lost.
Maybe going to minimum output was enough to make motor 1 lose sync. Maybe MOT_SPIN_MIN,0.1 is to low.
Is MOT_THST_EXPO,0.2 because you have T-Motor Flame ESCs? You can adjust it as per this guide if you need to:
set too high you can see instability at low throttle
set too low you can see instability at high throttle
Thanks for the reply @xfacta. I have two theories right now, and they might both be right. First, I had a crash previous to this one that damaged motor 1’s ESC caps a bit. I thought it was fine because she was able to fly again, but that may have played into things. Second, I have a 3D printed battery tray which, after inspecting the wreckage, had broken loose on the left side of the aircraft. I imagine this swung the battery to the left causing the motors to react.
Yes, MOT_THST_EXPO is 0.2 because of the flame ESCs (your advice was to set them to 0.2 or even 0.0). I tried tuning MOT_SPIN_MIN up from 0.1 and it caused the craft to spin the motors even when disarmed!
And yes the quads are flying a lot better now, in part from your tuning advice.
I’m going to replace the damaged ESC and run through a full setup calibration and report back.