AR_Wing, Omnibusf4Pro, LiIon4S2P, canon pocket size camera, runcam 3. Definetly quite heavy for recommended values, but taking off easy by side hand launch. Love cartography and this plane size is fun to make missions easily anywhere.
The point is that the plane does not fly as stable as expected, the CG is pinpointed at the manufacturer’s mark, the cruise speed looks like adequate, autotune has been made many times (prior to this flight), but looks like im missing many important factors to achieve a fine tuned flight. Main reason could be excess of weight, but in my opinion the plane has other issues in the config.
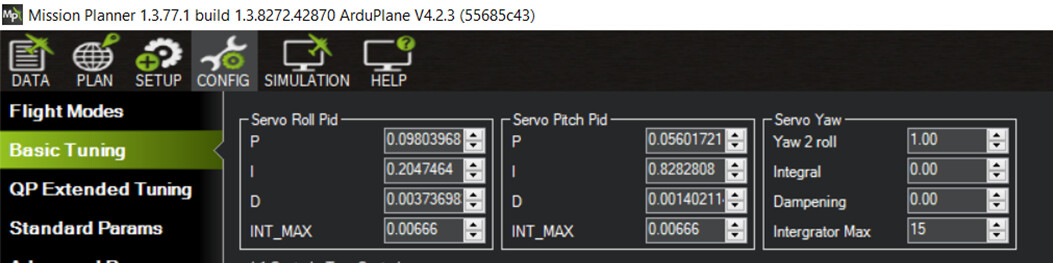
You still fly with the stock PID settings.
It looks like you never performed autotune long enough to allow it to store the new PID settings. Read the doc’s and some more patience at autotune should do the trick
I have the same craft. Similar setup with the batteries. Here are my PIDs which are good enough for me. As stated above you need to complete the autotune process on your vehicle and be sure they’re saved.
quite dissapointed, made many (many!) autotunes, definetly not all of them long enough, (I use to use autotune as an FBWA mode) but pretty sure that plenty of them were more than 20 times each side, and if i remember thats the recommended value in the wiki… Could be that I updated to the last firmware recently? Don’t think so, anyway, it’s clear that it’s my fault, will make a long autotune and chek if it flyes as intended with my fatty setup
Thank you!
Oh thank you! pretty sure that my wing is heavyer, with the pocket size camera and the runcam 3 at the front, but will be a better starting point for sure!