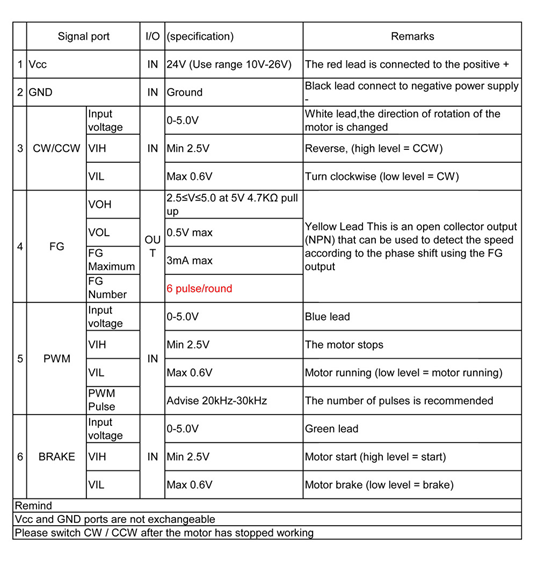
I am building a rover using four brushless motors with the following characteristics (shown in the table below)
can someone help me in setting up the parameters to get this to work with Ardupilot? I have been trying this for several days and can not seem to find a solution.
The motor is connected as follows (only testing one motor now to make it work … This is why I am only specifying the connections for one here):
Vcc: +12V
GND: GND
CW/CCW: Relay pin 1
PWM: Servo 1
Thanks in advance.