i just finish tuning PID on the helicopter hover in stabilize pretty good need a little bit to counter yaw and roll to the right, I’m not change value in Hover trim yet. When I try to fly Auto mission, it lift off with some yaw spin and it collect and hold heading. After it reach altitude the heli didn’t align its nose to the next waypoint. I changed WP_YAW_Behavior and the result was the same. I’m not sure that gain is not enough or I set something wrong.
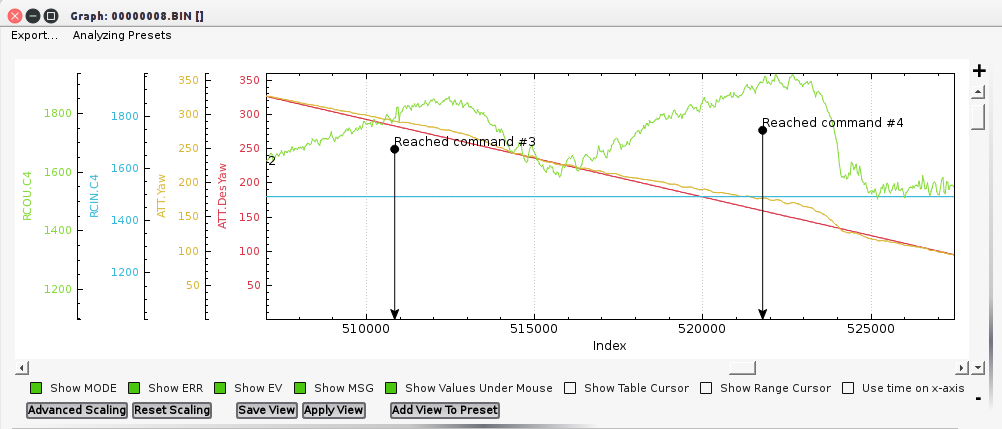
Where the heading deviates significantly your yaw servo is maxing out. Which tells me you don’t have enough tail authority on this helicopter. Could be caused by excessively low headspeed, helicopter disc loading too high and the tail can’t handle the torque. Or maybe it’s a stretch model and needs a longer tail boom, bigger blades or different tail drive ratio.
Since I don’t know the mechanical details of your heli, I’m only guessing at why you don’t have enough tail authority. But the yaw servo is definitely maxing out.
Thank you for your information. The heli config is Align700 Heli 3blade 800mm on main rotor, tail stretch to heli800size with 3blade 105 tailrotor. Headspeed is 1070 rpm, I’m try to get more endurance from low headspeed.
You will likely have to put different gears in the tail drive to run the tail faster, or use bigger blades on the tail rotor to have adequate tail authority. The log indicated the tail is simply blowing out, probably due to wind.