hello guys, I’m having a problem with the height of the drone in missions, as much as I indicate the height in the mission planner during the mission via telemetry, it is visible that the height is wrong, can someone help me. thanks!
You can’t get much help without onboard logs.
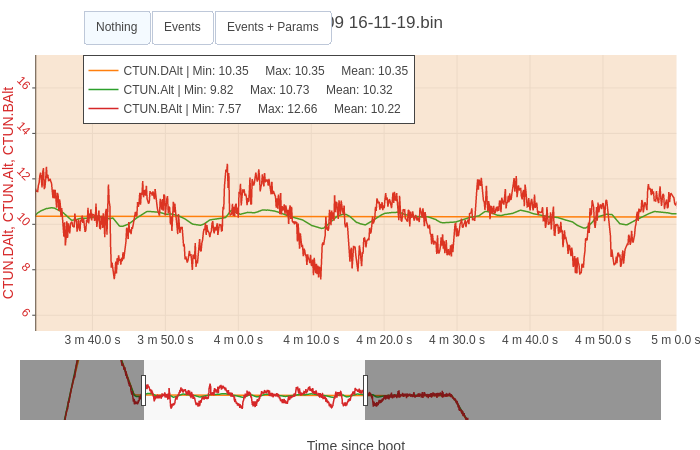
And in some places inside mission planner the height shown is AGL in some other places it is not.
But that does not mean that is wrong. It means the the reference is not explicit enough.
But like Mustafa said, without logs we’re just speculating
1 Like
OK. I will forward the logs here of some flights
Good night, sorry, I’m a little layman on the subject, I tried to export the log, I don’t know if I did it correctly. It also didn’t accept me uploading the file here, so I uploaded it to a link ok.?
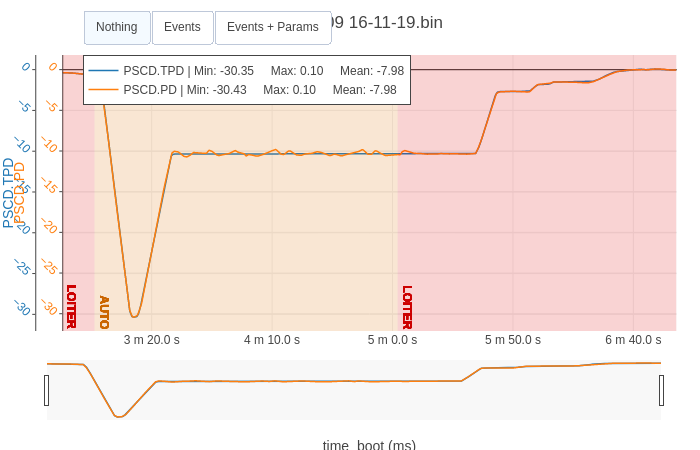
I can’t see any irregularity on PSCD, what was the issue?
The vehicle did everything you asked for.
Here is the altitude position controller log.
Which is really good, although you have oscillation on velocity and acceleration control.
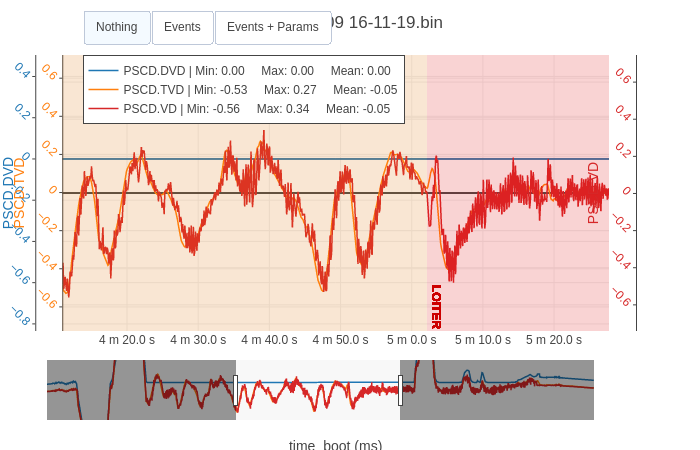
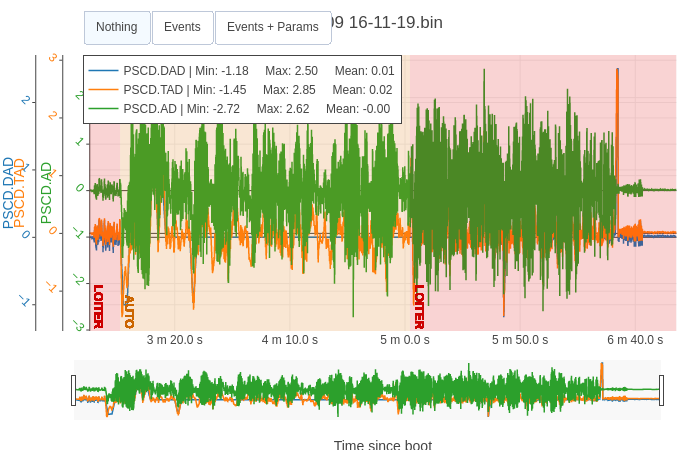
I think this is why you have some altitude error on altitude.
I think you vehicle flies well, but if you really want a really good result on altitude, you can tune the PSC_Z parameters on parameter list.
https://ardupilot.org/copter/docs/tuning.html#altitude-tuning
Also, your VIBE levels at z axis bit high, is the flight controller hard mounted?
Sorry for the delay, I didn’t get the notification.
I made some adjustments, it improved a lot, I was also in an area with a high rate of magnetic interference, Niobio extraction area.
I’m going to do more tests and rowing the logs, the board has that anti-vibration base.
thank you so much for now