Thanks a lot gentleman you don’t know how much this platform to discuss and get help really means I’m in debt to you guys.
Good question, tamer flying ![]() (just kidding) . So you have the Matek H743 version with the ICM20602 (IMU0) and the MPU6000 (IMU1). There is some precedent to switch to the MPU6000 as the primary IMU for the type of flying you are doing. If you take a look at @andyp1per 7" Long Range build blog you will find that he did this and he’s doing a lot of aggressive Acro flying. I have that same FC on a 7" but I don’t fly as aggressively and the default IMU order has worked for me.
(just kidding) . So you have the Matek H743 version with the ICM20602 (IMU0) and the MPU6000 (IMU1). There is some precedent to switch to the MPU6000 as the primary IMU for the type of flying you are doing. If you take a look at @andyp1per 7" Long Range build blog you will find that he did this and he’s doing a lot of aggressive Acro flying. I have that same FC on a 7" but I don’t fly as aggressively and the default IMU order has worked for me.
Perhaps do some more flying and see if this will be a real problem before considering this action. For a lot of pilots the configuration and tune you have would be great.
Awesome . Thanks for the help.
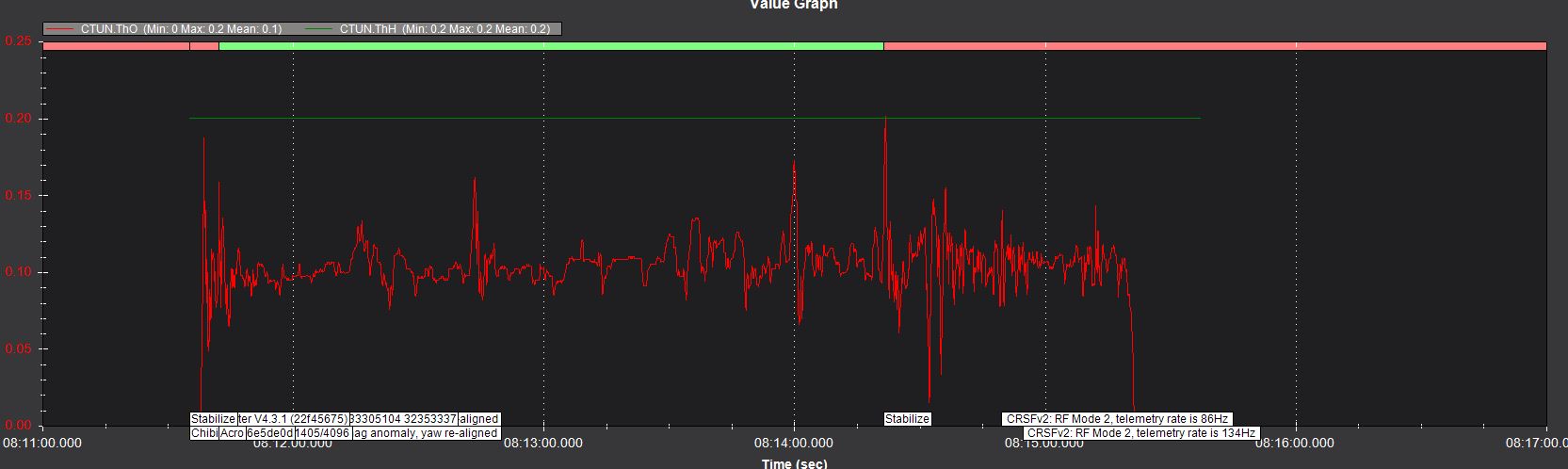
Good Morning just finished a test flight with the new GPS inputs and not sure if this related but my position hold is making motors slow down to where I have to switch into stabilize to get them back up. Or I’m wondering if running bidirectional Dshot and Dshot 600 on the new copter 4.3.1 is the issues. Let me know your thoughts?
https://drive.google.com/file/d/1YqKoLb0qYG3fBTjbMNk1pmtBYIB0u5Le/view?usp=share_link
https://drive.google.com/file/d/1AWDu0sm7Eek1MFJbdiRAnWes0gLm4hus/view?usp=share_link
Do I need to enable that to work? Maybe a parameter I missed
No. MOT_HOVER_LEARN is enabled by default (2, learn and save). Just Hover until it’s hovering at Mid throttle. Looks like it will be ~.1 something.
1 Like
Ok thanks. Love learning this Software ![]()
I was hooked when I bought a RTF quad in 2014 that ran Arducopter.
Got to say that craft is nicely dialed in. When the Rate Pitch/Roll looks like this you have done a good job.
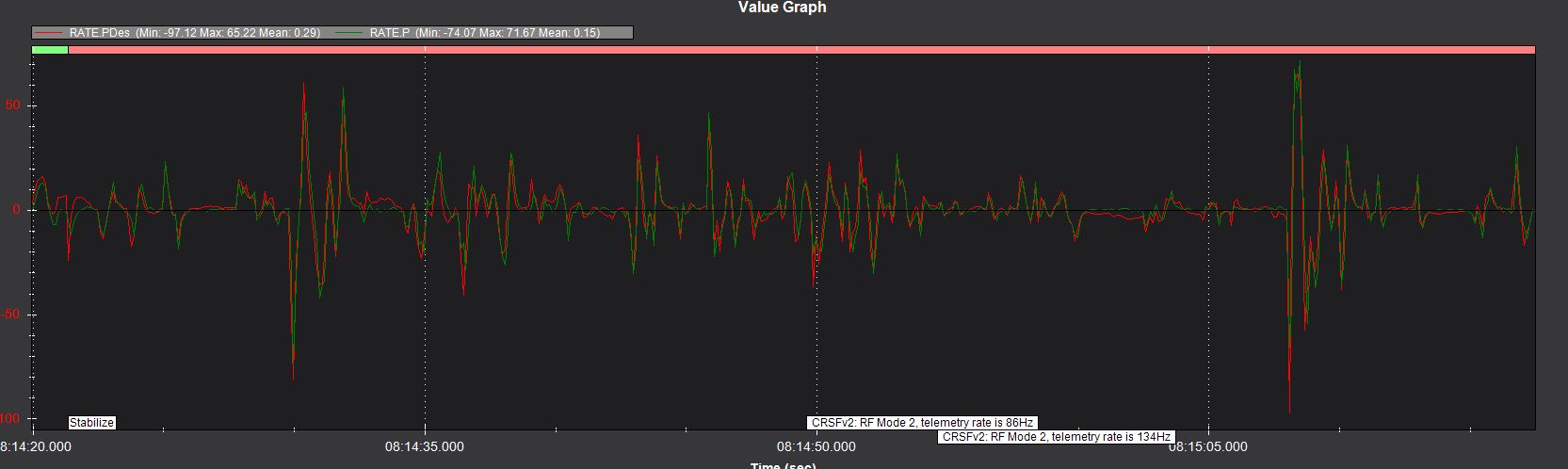
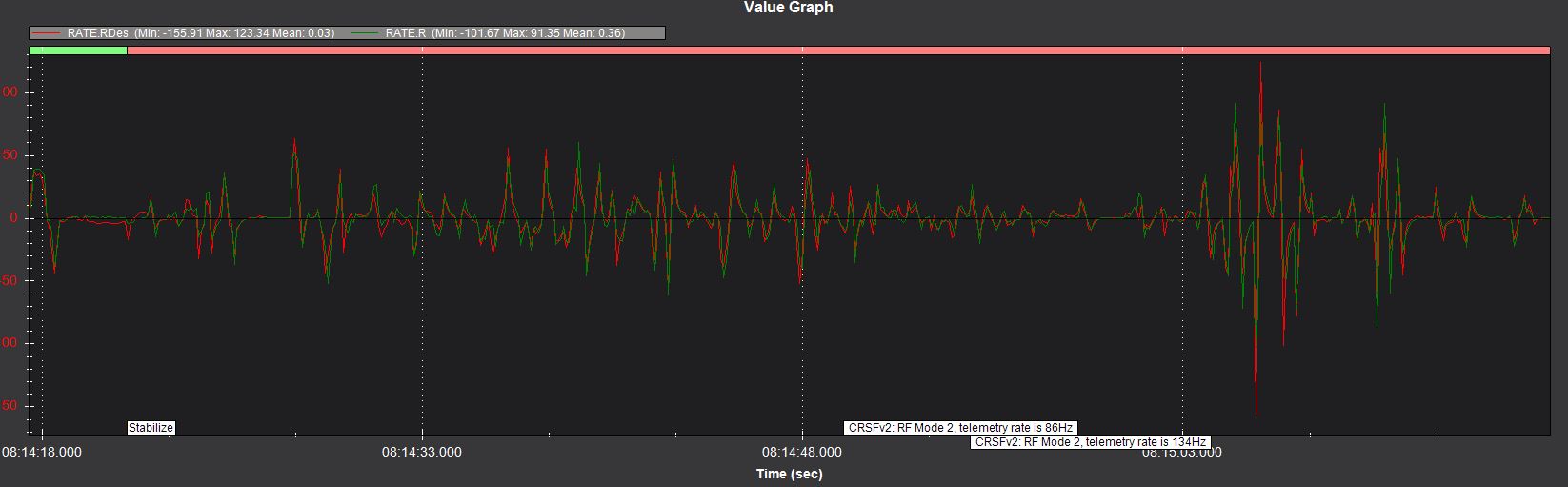
Angle Pitch/Roll is important and the initial indicator but this is more challenging to achieve.
Nice!! May be a dumb question but those screen grabs of graph are you using mission planner for that? I’ve been using UAV logger??
Yes, Mission Planner. I tend to use it most, MAVExplorer next. Each log analyzer has it’s advantages and quirks. Autoscaling of each field doesn’t work well for this metric. They need to have the same Y-axis scaling to see what’s going on.
Got ya. Thanks for the insight. Little windy today look forward to flying this thing sometime this week. lol getting it ready for a Disney shoot
Wow! What a nice craft. What’s the prop size on this Octo?
Should give a shout out to Shawn @xfacta He really gave you some excellent tuning advice for this result.
Cinelifter prop size is 10in carrying a gimbal with a Alexa mini on it
@xfacta I know I keep thanking you but thanks a lot brother. Since this journey and you guys help now people are asking is Arducopter really good. To me it is safe and thus far reliable. Betaflight is good but for people not carrying expensive hardware. Really do appreciate this
Ah, pro stuff. Very cool Anthony. A photo of that would look good on the Ardupilot home page!
1 Like
I have the Cinelifter’s little brother from Shen - the TerraPlane. Really nice designs from him. That thing is a real rocket ship even with a full (not “naked”) GoPro mounted forward of a 6S battery. Hovers at 8% throttle!
2 Likes
I’ll be sure to get it over to the site.
Yea this is a Swol 12s build and I have a bigger one for a movi pro that I’m in the process of building. We use QGC on our heavy lift Alta X so I figured why not have a FPV built with the same software in mind
2 Likes