Hi All,
So this is our first upload to the site and we need a bit of a hand.
We have been speaking to Craig Elder and he has suggested that we ask the help of the forum, you lot.
We have recently changed the autopilot of the Handsfreehectaer Iseki tractor from an Erle brain system to now run on a PixHawk Cube due to compass issues and more importantly ability to upload updates on to the Pixhawk.
Please find a shared folder on dropbox with .BIN files I have watched through the telemetry files and see where good examples of us operating show good and bad operation.
The version of the firmware is ArduRover V3.3.0 (2e0a474a)
The first operation we had error occurring with the compass every tight turn and we hoped that when we did a full compass calibration, we would have better operation!
We got the compass working well and it has seemed to be accurate since the 22nd however any light you might be able to shed with the system it would be helpful.
the other day we tried going back to basics a started to retune the steering PID settings as shown form the online manual but we seemed to get a worse operation.
The frustrating thing is that we have seen the tractor operate in a repeatable pattern on one day but when we need to get the system up and running first time we have no faith in the operation due to how we have seen it operate on the last log file seen on the 29th.
would any of you be able to help by looking in the the files and see a glaring problem with how we are setting up the tractor of if there is any issues you can see through the operations, please note we were changing settings on the tractor during these log files.
attached link to drop box https://protect-eu.mimecast.com/s/4VlhC71jBFPyJriEfBo_?domain=dropbox.com
if you have not heard about our project please look at our website:
Can access any files from the link. Some rubbish about having to enroll a device.
To help with the diagnosis is best if you provide a single log file that was created when you had an issue. Its too hard to go through many log files trying to find a problem.
I was wondering how you integrated the Pixhawk into the Iseki ie what hardware have you used for steering and speed control? Does the Iseki have a hydrostatic transmission?
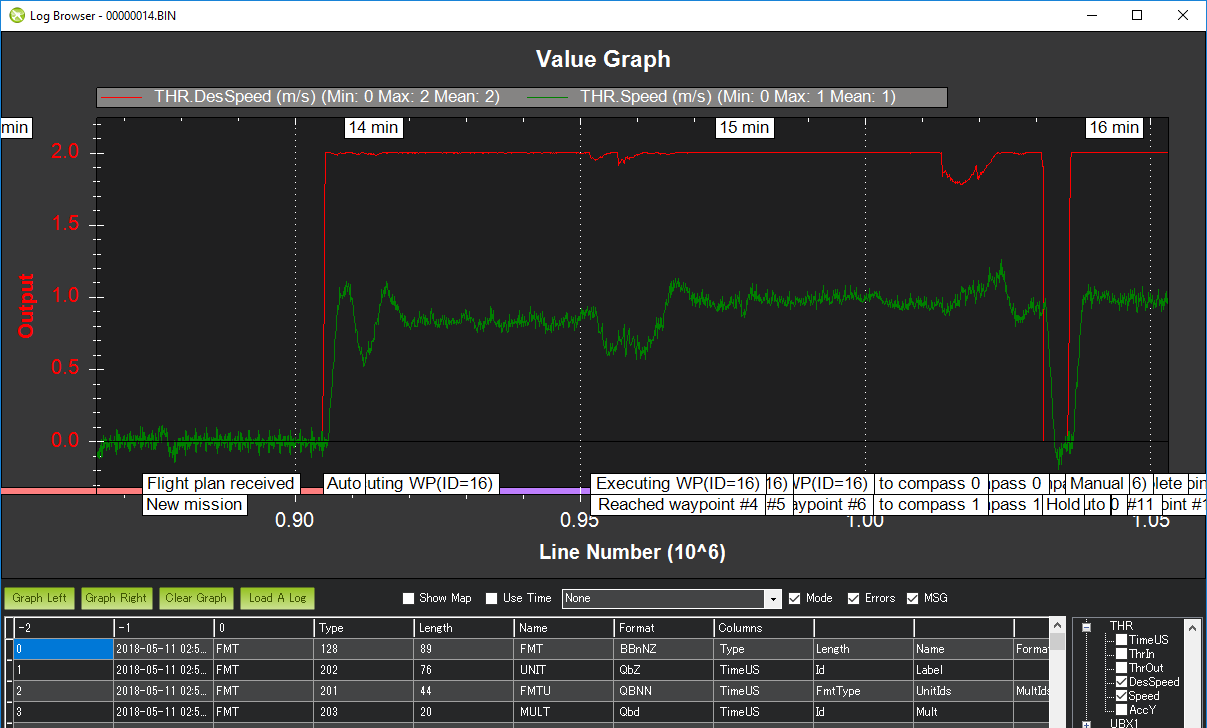
the CRUISE_SPEED and CRUISE_THROTTLE are at their defaults which I think are too high for this vehicle. The graph below shows how the actual speed (in green) is never reaching the desired speed (shown in red). This graph doesn’t show it but the throttle output is 100% (full throttle) (try graphing THR.ThrOut).
Since your post I’ve created a video which describes how to capture these value using the channel 7 auxiliary switch.
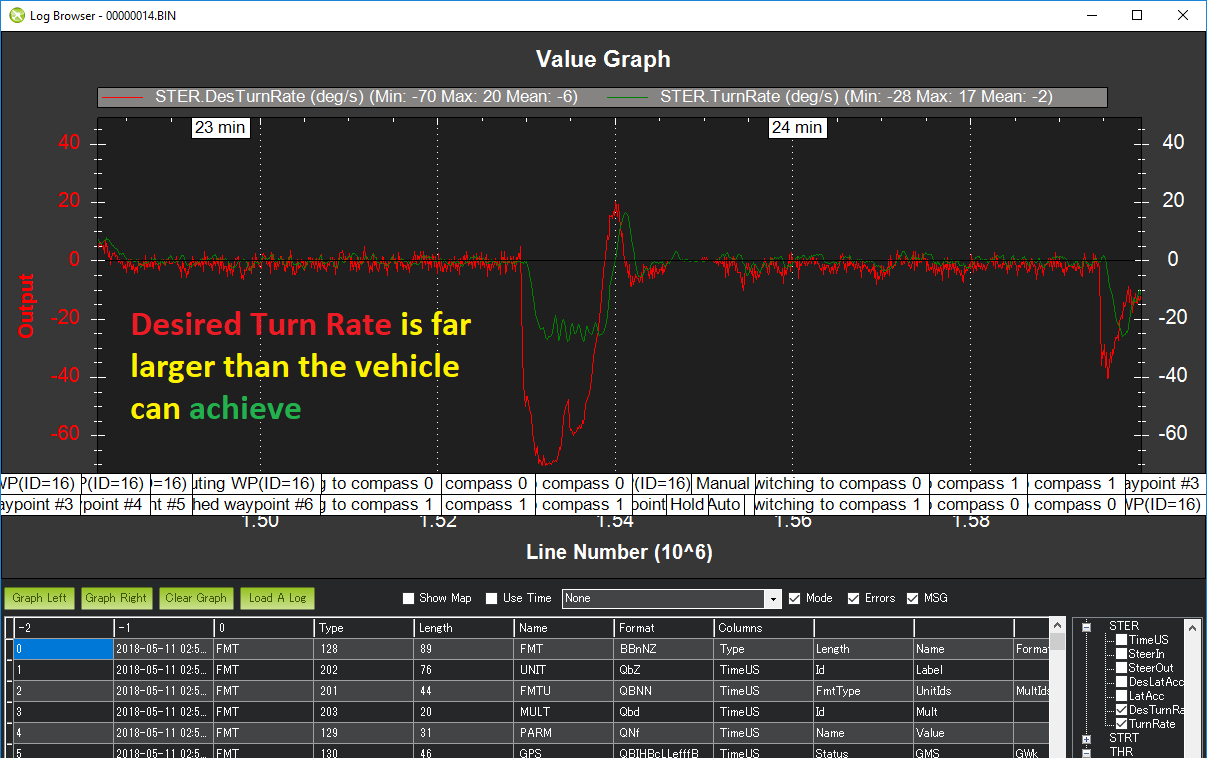
Re steering performance, the desired turn rate (shown in red) is much higher than the platform can provide (actual turn rate shown in green). Are you finding that the vehicle is overshooting badly?
I think the solution to overshoot (if it’s happening) is the land-based-speed-control (video). This is in master but not in 3.4. I was planning to include this in Rover-3.4.1 maybe.
I think upgrading to Rover-3.4.0-rc1 would be a good thing.
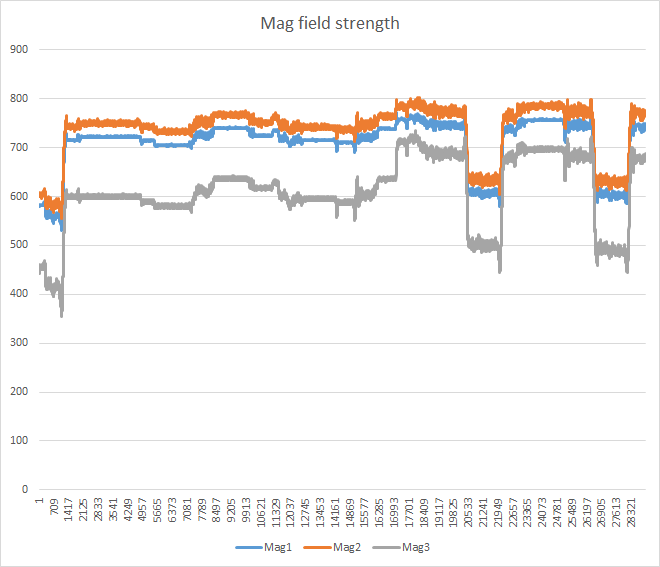
There’s definitely some problems with compass interference. because we can see the EKF is constantly switching back and forth between the internal and external compass. Also the magfield (see below) is changing a lot. To work well, we really need to have the compass interference below 30%. It looks like it’s more like 50% ~ 100%.
I think it would be good to disable the internal compass. If you’re using the mission planner there’s a few compass-use check boxes on the compass calibration page. The left most compass is the only one that should be left checked.
… somehow we just need to get the compass further from any source of interference…
Hey Craig,
Thanks for your reply apologies for the delayed reply but thinks have been very hectic the past week with us demonstrating the Combine at a UK event Called cereals. All went very well though.
Thanks for your suggestions and link to the video we will update the software as requested its an obvious thing to do now there is a newer version.
Thanks for looking through our log. you remarks have been noted.
A quick question how do you suggest calibrating the IIMU & compass for setup on out tractor when its attached to a rollover bar.
I’m just wondering is there a way to is there a way to weight the decisions of the control more to the GPS positions.
The next week we will be getting out in to the field and testing a bit more which will be the truth behind us tuning the system.
Ideally the flight controller should be mounted equidistant from all four wheels and vertically near the center of gravity. It’s not critical but if it was mounted very high and the vehicle rolled or pitched a lot it could lead to incorrect velocity estimates… we haven’t seen that in the logs though really (although I also haven’t been looking).
Mounting of the external GPS/compass is important in that it should be away from metal if at all possible. There’s no easy way to calibrate the compass while on the vehicle without rotating the vehicle which is difficult in this case. Perhaps compass “learning” can be used but I haven’t tested it on rover’s yet.
I have pondered the same issue when trying to calibrate the compass on my rover. It is too heavy to pick up and rotate. I read somewhere on a forum where somebody said they placed the pixhawk on it’s side and end as well as sitting flat and drove the rover around in each position to gather enough date points for the calibration. I haven’t tried it myself but I intend to.
Good luck and congatulations on your award from the BBC!
That’s an interesting idea but one issue with this method is that because the rover frame itself is essentially changing position vs where the compass is, interference from the frame is not going to be properly compensated for. I think the results wouldn’t be better than simply taking the flight controller and GPS/compass unit off the frame and doing the calibration separately (i.e. far away from the frame).