Hello all,
Today during the test flight my quad started wobbling. I was using the herelink with Solex and didn’t see ground mag anomaly error until I opened the log. Until today I flew it probably close to 200 times, and had no issue. I’m using Pixhawk Cube orange and have 2 Here 2 GPS’s. One on CAN and one on GPS pin. Only using the external compasses. Calibrated the quad in the parking lot, then powered the drone inside a building (not sure if this somehow affected the compass params) and unplugged, then went outside, powered, and flew the drone. In AUTO mission it took off and then started wobbling. So I switched to Loiter and landed it. Parking lot was mostly clear (had at most 5 cars) so I don’t think metal was interfering. .
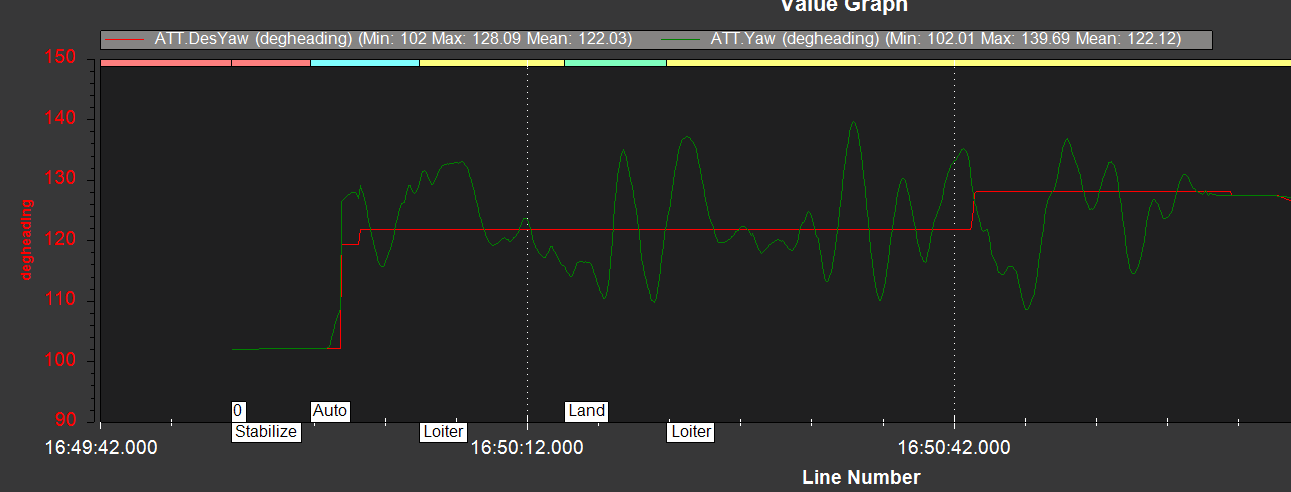
This is the yaw output. Is it supposed to look like that?
Ground Mag anomaly happened couple months ago, but at that time I also was using the internal compass. Motor interference calibration didn’t help so I stopped using the internal.
Please let me know if anything looks weird.