Hi all,
I am having trouble getting some code to run on my new system using the Navio 2. I am in the middle of switching from using a Raspberry Pi 3 and Pixhawk to using a Raspberry Pi 3 and Navio 2. In terms of software, this project uses the ArduPlane flight stack controlled by Dronekit and Python code. The plane itself is a Fly Zone Calypso. I communicate with the plane using two Alfa AWUS036NEH dongles (one on the plane and one used by a laptop over UDP sockets via some Python code). Besides any message listener threads employed by Dronekit, the code is single-threaded.
The problem with the software is that the GPS does not seem to be updating when it prints a timestamp to a diagnostic file. In fact, the GPS time, location, and other GPS info do not update. A screenshot of my diagnostic files can be seen below:
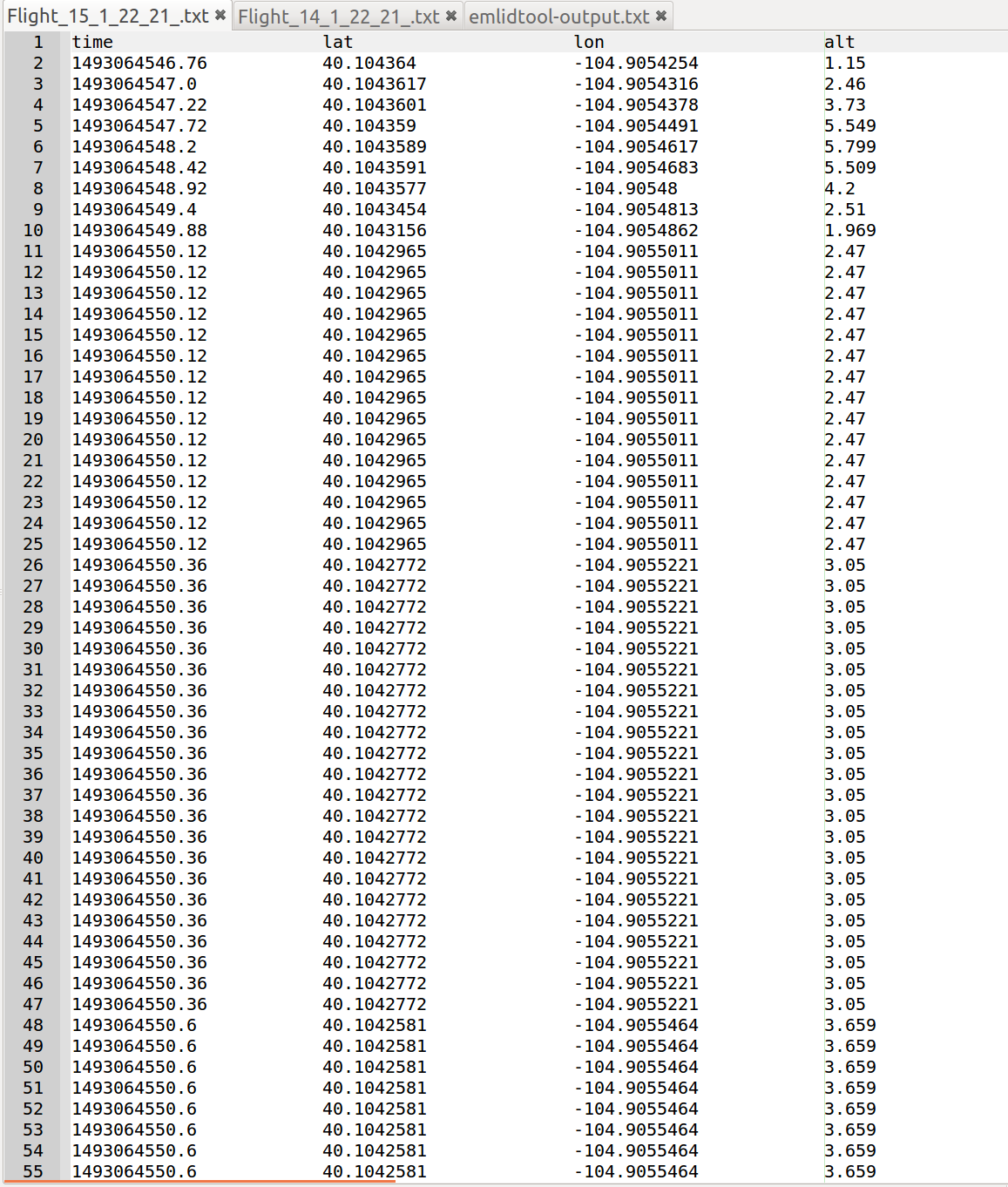
Note: The GPS seems to update at the beginning when the plane is on the ground. However, after takeoff is when the repeated updates occur. The single software loop should at a rate of 500 ms (i.e., 2 Hz). The Navio 2’s GPS and the MAVlink connection itself should be able to handle this as it did before on the Pixhawk. Therefore, these diagnostic files should have different times printed with each line rather than the same GPS update printed for 10 - 20 lines. An identical line printed ten times implies that the GPS did not update for two seconds. This cannot be right. Before, when the software used a Pixhawk, repeated lines never occurred more than twice in the diagnostic
Thus, I run the emlidtool on the command to see if there are any issues and I get this error which seems like it should be unrelated:
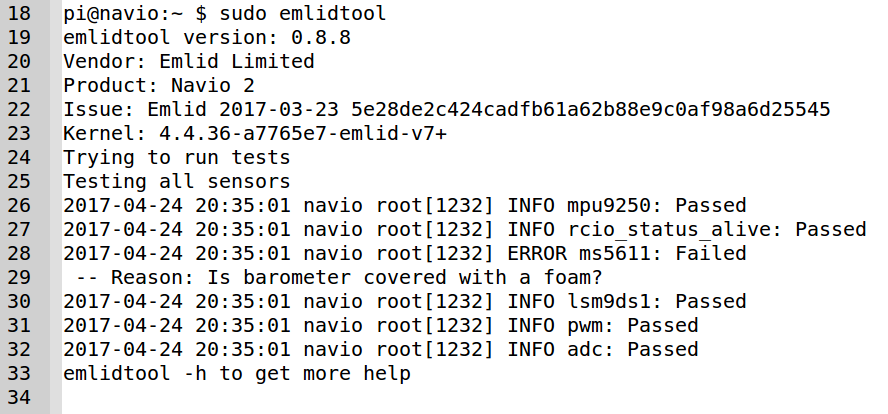
I do have some altitude problems and the barometer does not seem to be covered but could this be related? If not, does anyone know what might cause the Navio 2’s GPS to stall? The first guess is that since the problem occurs after takeoff that the GPS might be experience electromagnetic interference (EMI) from the servos and motors.
It should also be said that I’ve seen this problem persist when using “udp:127.0.0.1:14550”, “udpin:127.0.0.1:14550”, and “udpin:0.0.0.0:14550” as the connection string used by Dronekit and ArduPlane.
Another thing I checked was that the ArduPlane parameter for GPS type was set to “Auto Detect”. It was but is there another ArduPlane parameter for GPS that needs to be set? Is it somehow possible the Navio has a mismatching baud rate with the GPS? Is this an issue with Dronekit or the MAVlink/MAVproxy connections employed by Dronekit?
Thanks for reading the entire post. Any help is greatly appreciated.