Hi, i’m using two f9p rtk for using Moving Baseline.
FC is v5 nano, firmware version is 4.1.2. Quadcopter.
I have two identical drones, both with the same phenomenon.
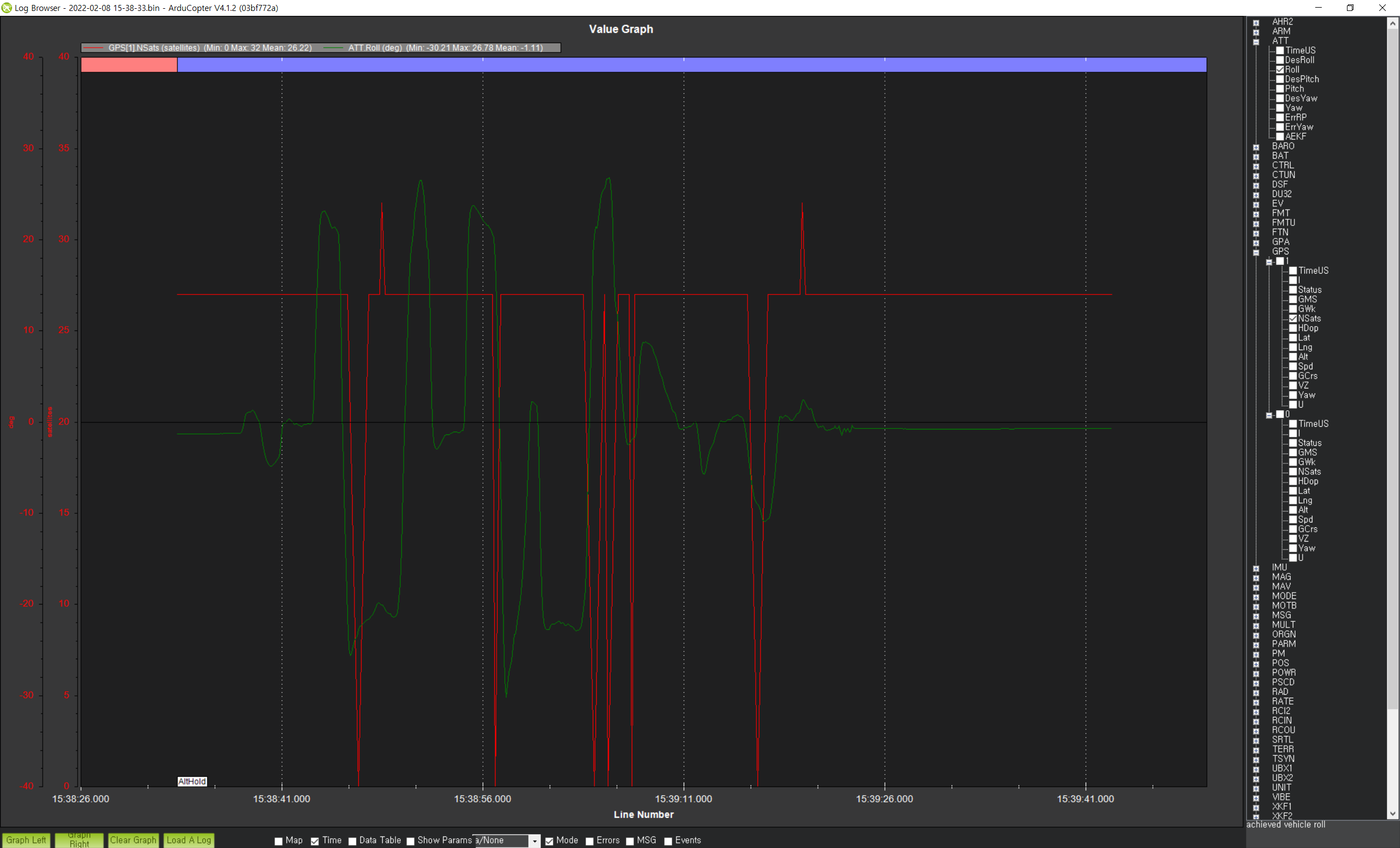
When the roll axis approaches 30 degrees, the GPS of the UBlox Moving Baseline Rover disappears.

-DRONE 1
-DRONE 2
2022-02-08 15-38-33.zip (685.9 KB)
-DRONE 2 LOG FILE
Changing the FC(nano->nano) did not solve the problem, so I changed the version.
I solved this problem by changing to version 4.0.6.
But I’m curious why this happens in version 4.1.2.
Could there be something wrong with the settings?
DRONE 1.param (17.7 KB)
DRONE 2 V4.0.6.param (18.3 KB)
DRONE 2 V4.1.2.param (17.6 KB)