Tuning can be improved, that will actually help in that you can better see what’s going on and trust the copter more. Also you’ll know if problems are creeping in. Use Loiter instead of PosHold.
As a summary, I think the changes I’m proposing will improve the GPS situation and start to improve the tuning - these combined should make a big difference to the position errors you are seeing.
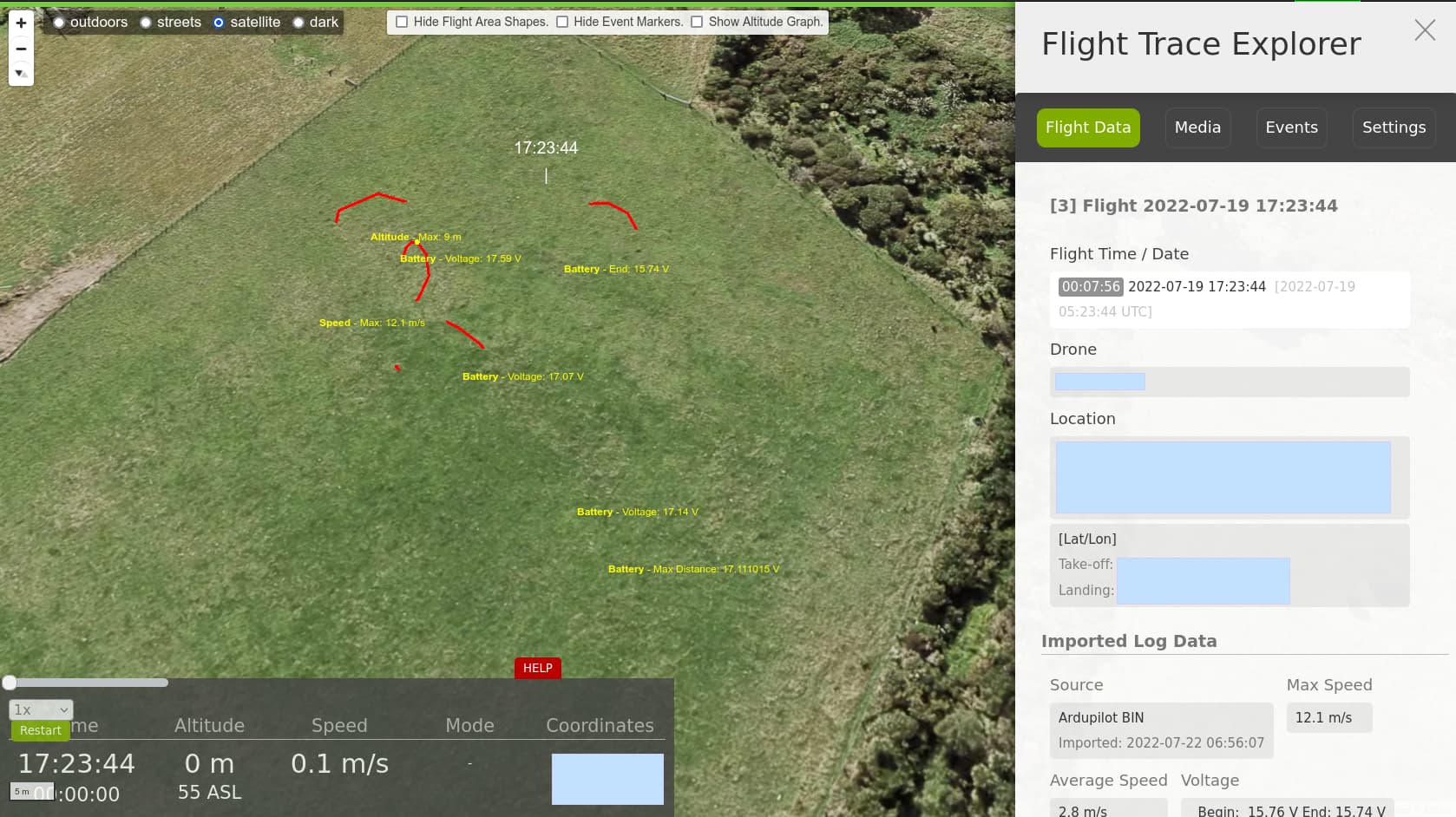
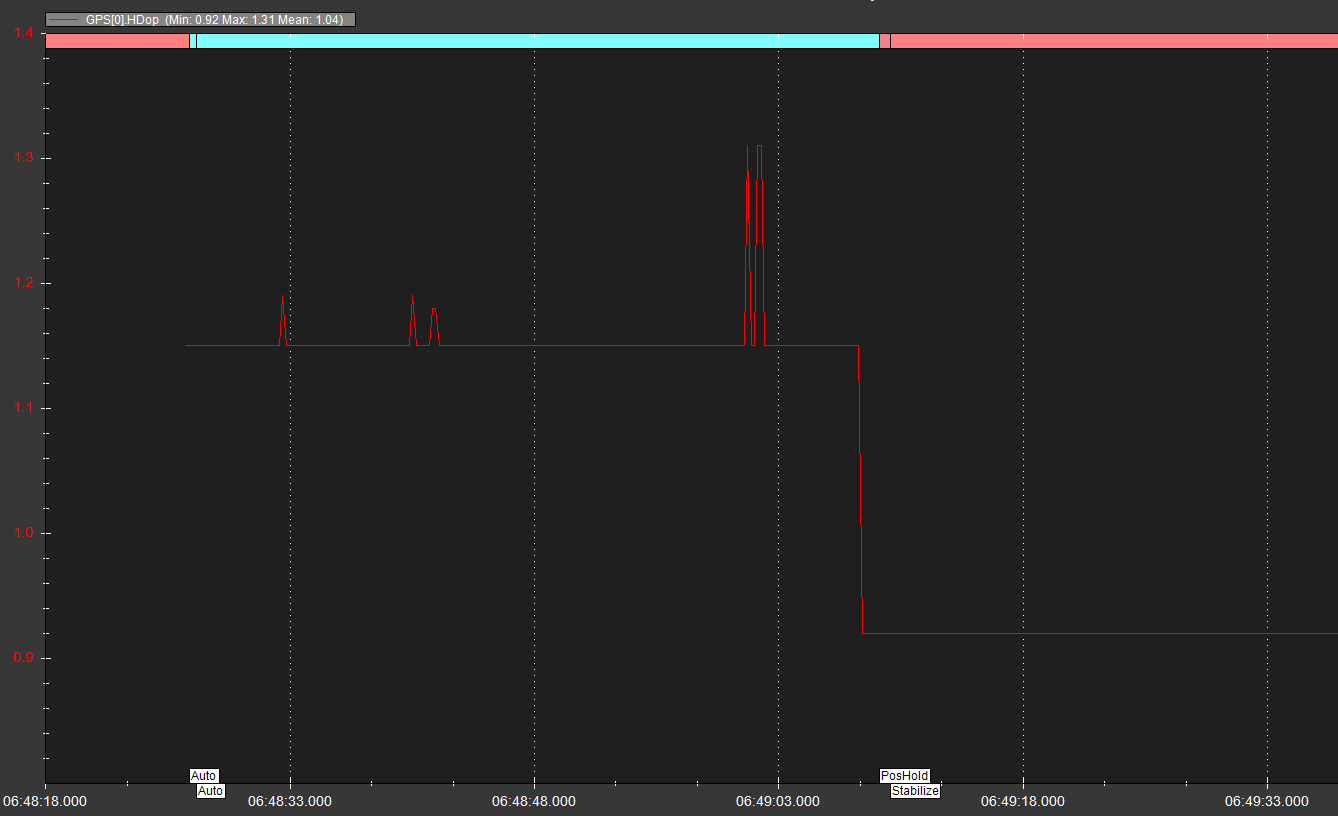
But first, the GPS HDOP is bad for a lot of that flight, HDOP is not everything but it is a strong indicator. A value of below 1.0 is OK and 0.8 or below is quite good.
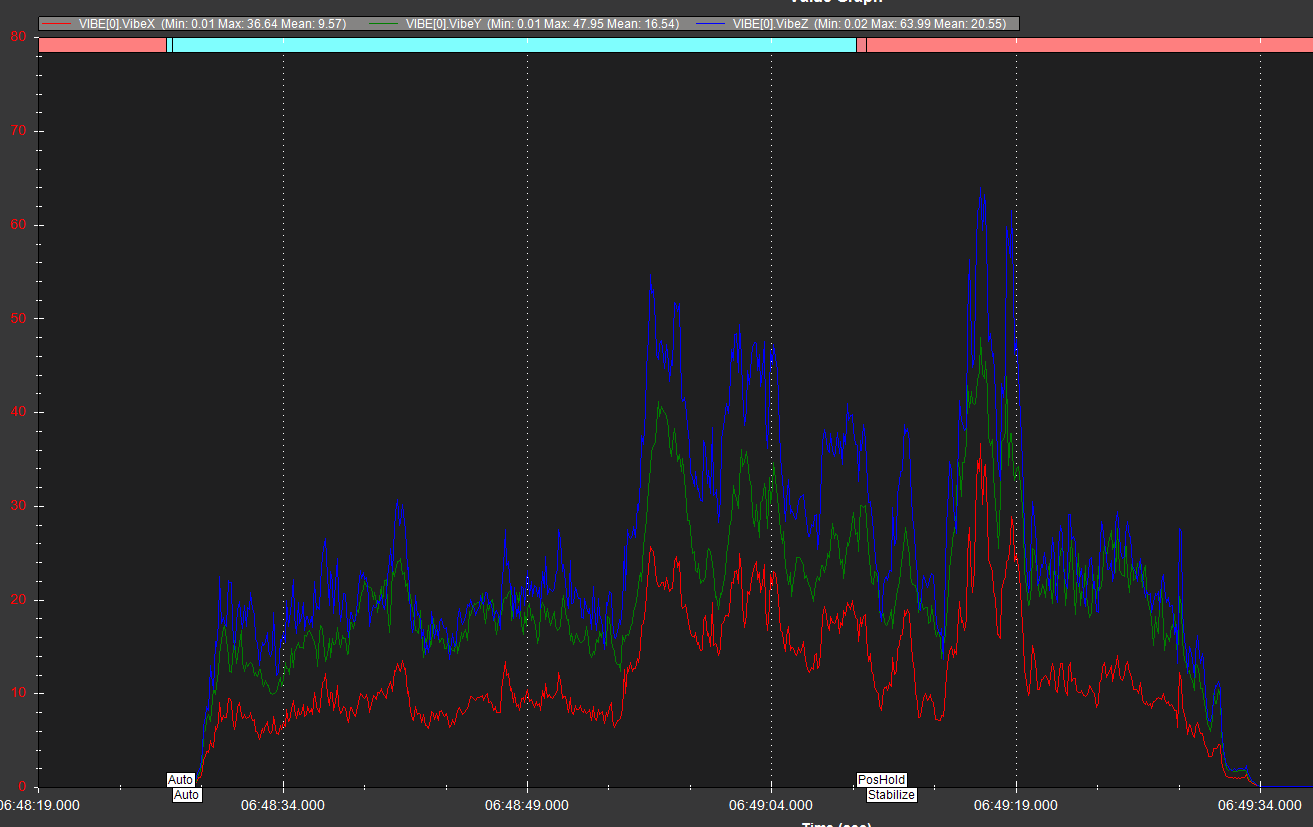
And vibrations are bad, you need to get them all below about 15 or 20, especially Z axis.
Hold off on doing flying until you fix the vibrations at least! There’s sections in the doc about fixing vibrations.
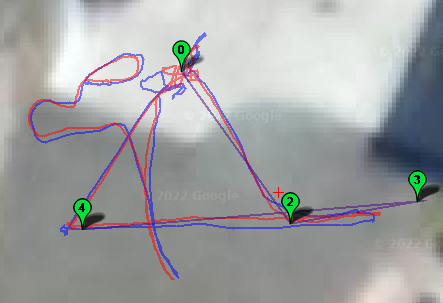
These two things combined mean your GPS track and IMU-calculated position are never aligning - the copter will be having a hard time working out where it is exactly. The red and blue lines should be one on top of the other when everything is operating correctly.
To improve the GPS performance try
GPS_GNSS_MODE,5 or 65
and see which gives you the best/most stable HDOP - you can do this outside while connected to MissionPlanner via cable if you need to. Power-cycle between changes. There’s no need to launch and fly.
Then improve the tuning and a few things
Set these
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
FENCE_ENABLE,1 ← see text further down
INS_ACCEL_FILTER,10 ← the new default, advised to use this
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
Next, connect to MissionPlanner / Mandatory… / Initial Parameters
and put in your battery cells and prop size.
Accept every change it offers.
If you’ve sorted the vibrations you can test fly, no need for aerobatics or Auto missions, just some Althold and Loiter. This way we can check how things are going and adjust the Harmonic Notch Filter before doing an Autotune.
The Fence enable parameter is frustrating to many people, but so is your copter headed off to Sea of Japan when it thinks it’s doing a RTL. This wont let you arm in ANY flight mode until there is a good GPS 3D Fix and Home can be set. It can seem to take a LONG time to be ready to arm, although subsequent flights can be much quicker to arm. Small copters close to the ground can be held up in the air or put on a table until conditions are satisfied.
Some people say you can just select Loiter and wait for the green LED (or ability to arm) - that in effect is the same thing but with human error involved. Some would also launch and then switch modes to a GPS-assisted mode and not realise the mode change was denied, and therefor flying with the wrong assumptions.
I think it’s not a default because a few years ago most GPS units would not get a good 3D Fix close to the ground and didnt work properly until airborne. My opinion is it’s better to set this param and wait a few extra minutes so you know the GPS is working.