I flew a test mission today with my little Hexsoon EDU-450 to see how the improvements from all the great support I’ve received over the last couple of week have sorted out.
The copter is stable - even on the 400’ descent on RTL. Motors ran cool. And no issues on doing loiter when flying in auto in a mission. The FFT dynamic filter is magic!
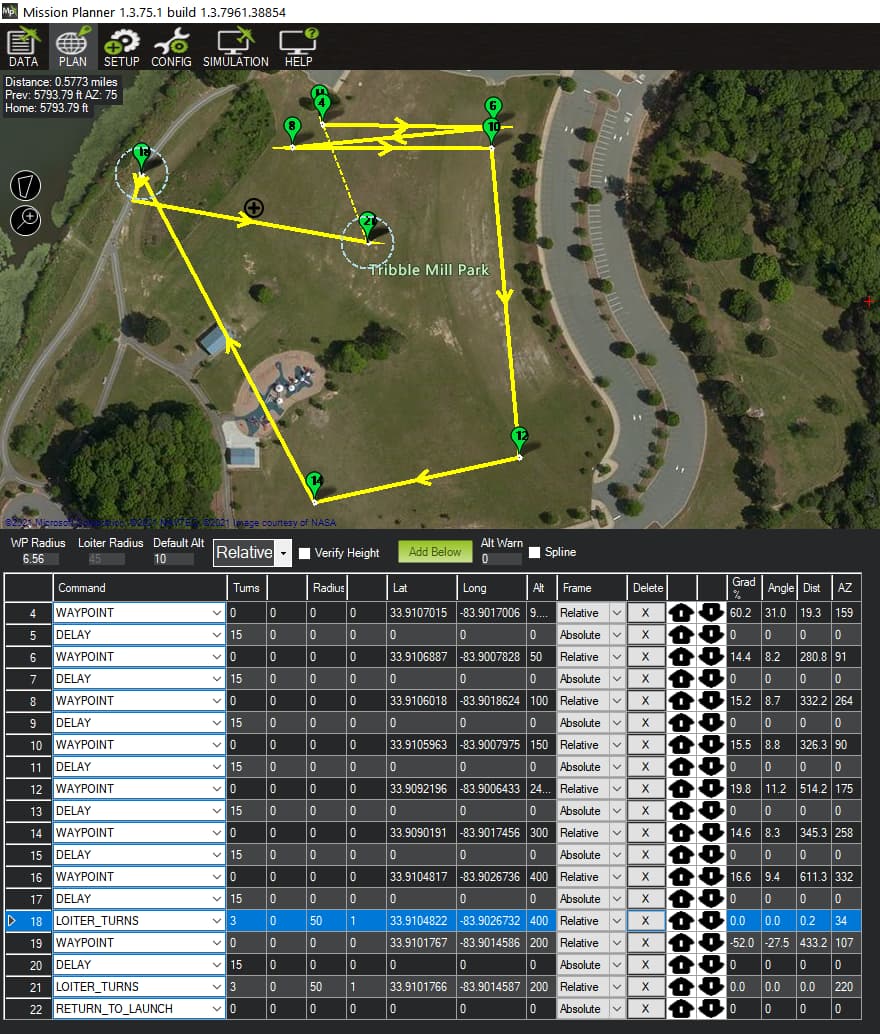
I had planned a mission hoping to get up to 20 minutes to get a good battery test. The last two waypoints had a three turn 50’ radius loiter - and it was clear that after the first circuit on the first loiter WP that I wouldn’t be able to complete the mission with the available battery. (I can usually do 20 minutes - I did a RTL at about 15 minutes to ensure I landed safely with no problems.)
I’ve included a copy of my mission and a link to a video from the on-board Naked GoPro. Because the GoPro is hard mounted, the video does a good job of showing the copter’s stability.
And anyone interested in seeing the yaw behavior in an auto mission loiter - there’s one and a half complete turns in the loiter before the RTL. Note that the copter goes to the WP, then travels out the radius, then does the circuits.
The old computer on my workbench isn’t too zippy - and when viewing the video I get a wee bit of yaw twitch throughout the video. I’m pretty sure that’s just a video artifact - either on the recording end - or on my display here…
The horizon also provides a good indication of how the copter compensates for cross wind. With only a 5 mph forward speed - a little wind has an effect.
Lots more work to do - but just wanted to express my appreciation for all the help I’ve achieved to date.
Thanks and Regards - Joe Stroup