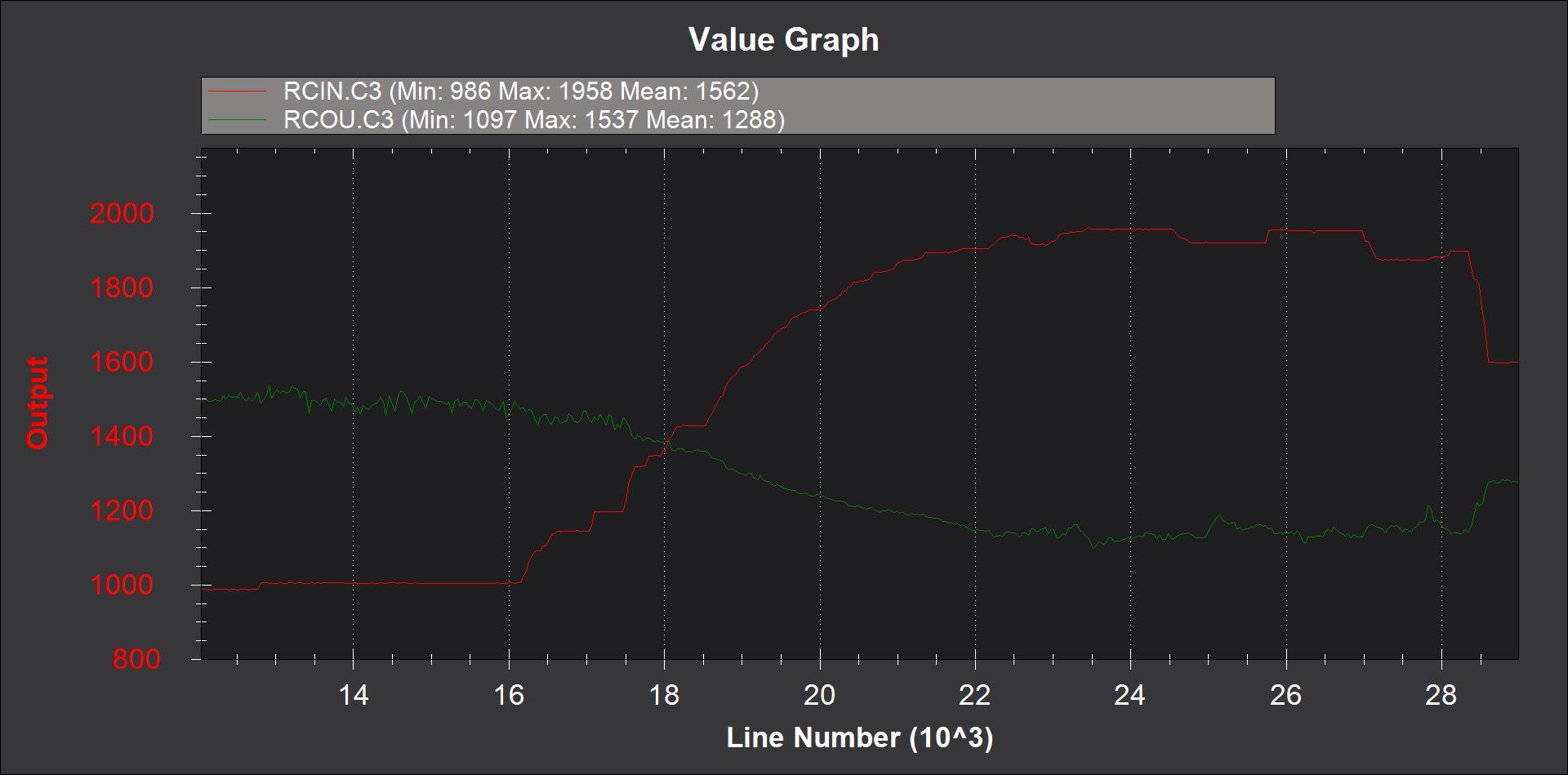
Hey all, I’ve just recently flown a Goblin 500 Sport with Arducopter 3.4.4, and a few seconds after takeoff in Stabilize mode, it came straight back down and hit the ground hard even with close to max collective and fairly high throttle. I’m using a Hobbywing Platinum 100A V3 ESC in governor mode and have roughly 2000-2100 RPM headspeed. I can’t conclude much from the logs except the throttle and collective values, perhaps someone else could take a second look?
Thanks for looking at the logs, much appreciated. Regarding the Channel 3 reversal, with the current settings, the direction of stick movement on my transmitter corresponds correctly with the swashplate moving upwards - do you mean reversal in some other sense?
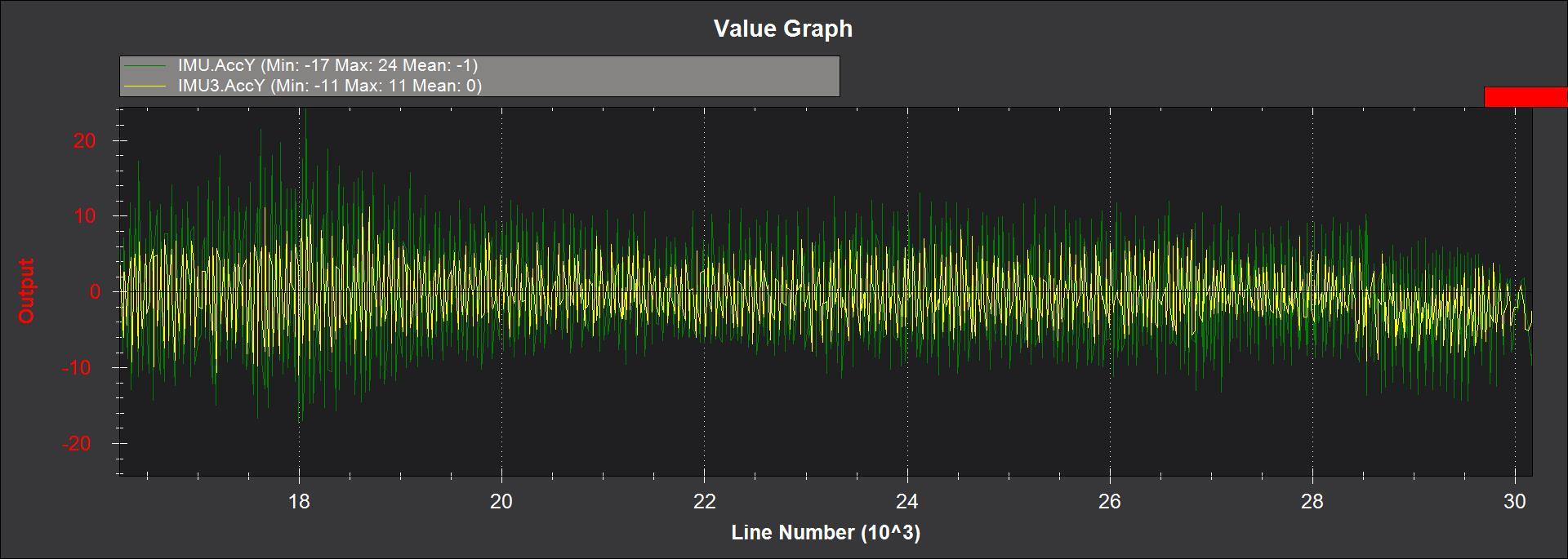
Also, what are the acceptable vibration levels I should be aiming for? I’m using a Pixhawk 2 and I believe they’re quite a lot more hardened to vibration than the original Pixhawk (which had acceptable vibration levels of 0.3/0.5G) due to their redundant and dampened IMUs.
I’m very sorry for not getting back to you earlier with answers to your questions. Hopefully you have sorted it out by now?
I think it’s called a double reversal, the channel is reversed in your TX and also reversed in the Pixhawk. i.e. if you flip both, you will still get the same stick/ swashplate movement but the autopilot will climb/descend correctly.
Don’t quote me but I believe vibration levels that we should aim for are still 0.3/0.5G, even in the Pixhawk 2. (The sensors are still the same as P1 but your airframe vibration is get passed this extra level P2 onboard dampening.) Your Y-axis is about 1.1G and if you look at IUM1 and IMU3 (IMU3 is not dampened). IMU1 has higher levels than IMU3 and internal dampening is not helping/ making it worse for you.
No problem, thanks for the help! I’ll get right on it, what you’ve said about the double-reversal makes sense. Working on the dampening problem as well.