Greetings
When I change min and max degree in APMPlanner, gimbal rotates. But when I try to control it from transmitter, it does not respond.
@killjoy,
What function do you have the RC6_FUNCTION parameter set to in the Full Parameter List?
Regards,
TCIII GM
[quote=“TCIII”]@killjoy,
What function do you have the RC6_FUNCTION parameter set to in the Full Parameter List?
Regards,
TCIII GM[/quote]
RC6_FUNCTION is set to 0
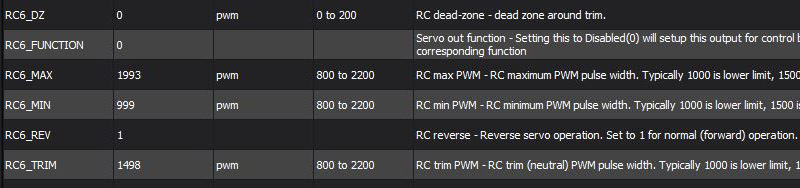
my RC6 parameters:
@killjoy,
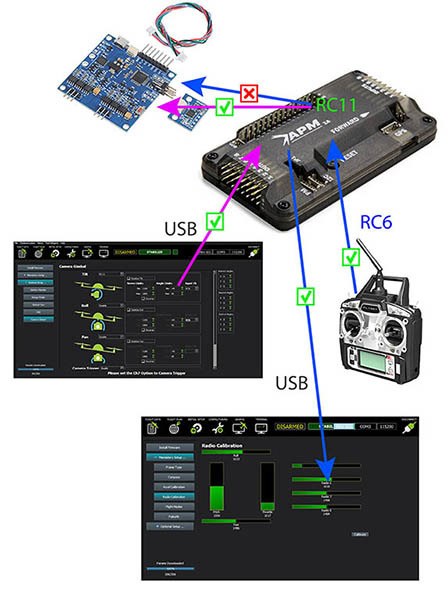
Have you followed these instructions from the Camera Gimbal Control Wiki: http://copter.ardupilot.com/wiki/common-camera-gimbal/
The Wiki instructions/diagrams seem to be different from your diagrams?
Regards,
TCIII GM
@TCIII,
Yes, I set everything like on screenshots from the instructions.
And if I change some min/max values in APMPlanner, my gimbal will move. But I can not find out why it’s not sending my RC6 values to the gimbal.
RC6_FUNCTION should be set to 7
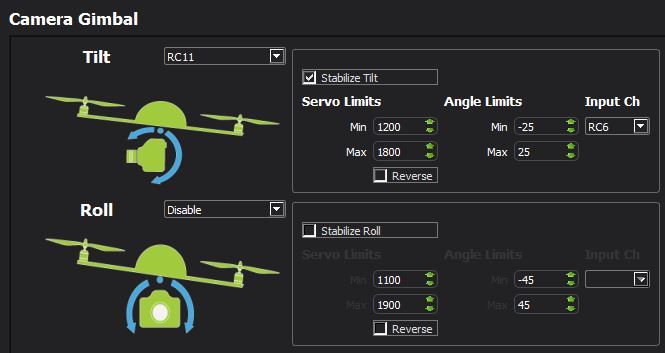
For the screen shot you posted RC_11 will be set to 7, and MNT_RC_IN_TILT should be set to 6. RC6_MIN and MAX should be set by the calibration procedure.
If you look at the ‘debug output’ for APM Planner 2.0 you will see something like
DEBUG 2015-01-29T15:33:32.068 Setting RC Parameters Channel: "11" function: 7 min: 1100 max: 1900 reverse: 0 comp: 1
DEBUG 2015-01-29T15:33:32.069 Setting Mount Parameters input Channel: 6 type: "TILT" minAngle: -45 maxAngle: 45 comp: 1
DEBUG 2015-01-29T15:33:32.069 Setting RC Parameters Channel: "11" function: 7 min: 1100 max: 1900 reverse: 0 comp: 1
DEBUG 2015-01-29T15:33:32.070 Setting Mount Parameters input Channel: 6 type: "TILT" minAngle: -45 maxAngle: 45 comp: 1
DEBUG 2015-01-29T15:33:32.136 Camera Gimbal Param Changed: "MAV 001" param: "MNT_RC_IN_TILT" QVariant(int, 6) compiD: 1
refresh parameters "MNT_RC_IN_TILT"
DEBUG 2015-01-29T15:33:32.137 APL::parameterChanged: "MNT_RC_IN_TILT" char= "6" int= 6 float= 6
DEBUG 2015-01-29T15:33:32.138 Camera Gimbal Param Changed: "MAV 001" param: "MNT_RC_IN_TILT" QVariant(int, 6) compiD: 1
refresh parameters "MNT_RC_IN_TILT"
DEBUG 2015-01-29T15:33:32.139 APL::parameterChanged: "MNT_RC_IN_TILT" char= "6" int= 6 float= 6
PS: I also noticed the stabilization option for tilt/roll/pan was not being updated, so that is fixed it in master and will be in the next release. I suppose it wasn’t noticed as many users now use brushless gimbal controllers
You can try it before then by downloading the version here firmware.diydrones.com/Tools/APM … 015-01-29/ or a later date
When I try to write RC6_FUCNTION from 0 to 7 or different value, my rear left motor start to spin.
What means this 7 value?
I think you need to be careful that you arent confusing rc6 from the RX and APM. I am not ibfro t of mission planner. Is your copter a hex or moer? You might be editing settings for a motor output.
sent from my phone so apologies for any typos
Hex
Ah. I think the rc6 thing you are tweaking is to do with that motor. Are you seeing rc11 is the motors out log? Not sure if it does but if it does it should corrospobd to what you are trying to send to the gimbal.
sent from my phone so apologies for any typos
MNT_RC_IN_TILT should be set to 6. The gimbal config view will set it correctly. Post your param file so we can verify.
Sorry for my phone posts that probably didn’t make any sense what so ever.
Some things I would test on top of the config the guys are talking about.
Look at RCIN log for ch 6 to see you receiver is been seen and changing as expected.
Look at RCout chan 11 to see if your gimbal is being commanded as far as the software thinks.
Also my query about if it was a hex, motor 6 is the rear left on a hex…and you said motor 6 started spinning when you adjusted RC6_FUNCTION. Looking at the param list this is an output for chan 6! which explains your motor spinning when changed. I don’t think you should be touching RC6_FUNCTION, this does not relate to chan 6 input.
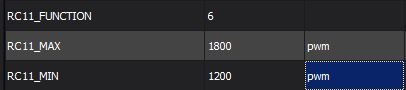
Here, if I change RC11_MAX/MIN, gimbal moves. RC11_FUNCTION has no effect.
All I can notice, is that RC11_MAX/MIN has pwm in Unit field.
About logs, where I can check it in realtime? I can find only MAVLink Inspector for it.
If you want to control tilt it needs to be set up 7. And tilt in set to 6
Like this?
I already tried all the parameters you told.
That rc function needs to be set to 7 and mnt_rc_in_tilt is 6.
When I get home I’ll set this up and test. Just to confirm. But APM Planner 2.0 camera config view should set this all correctly and I have tested it before (I wrote the code for that!)